Obliczanie pól figur płaskich
Autorzy:
Witold Majdak
Obliczanie pól figur płaskich
Obliczanie pól figur płaskich
Autor: Witold Majdak
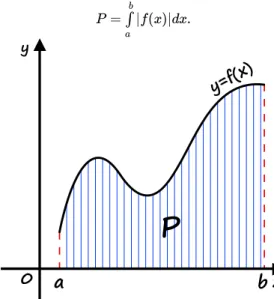
Z definicji całki oznaczonej Riemanna wynika, że jeżeli jest funkcją ciągłą i nieujemną w przedziale , to całka jest równa polu figury ograniczonej przez wykres funkcji , oś oraz proste i . Tak zadaną figurę, którą możemy opisać jako zbiór
nazywamy trapezem krzywoliniowymtrapezem krzywoliniowym. Jeżeli dla , to W rezultacie dla dowolnej funkcji ciągłej prawdziwy jest następujący związek:
Rysunek 1: Pole figury płaskiej zwanej trapezem krzywoliniowym
f : [a, b] → R
[a, b]
f(x)dx
∫
b aP
f
OX
x = a x = b
{(x, y) ∈
R
2: 0 ≤ y ≤ f(x), a ≤ x ≤ b},
f(x) ≤ 0
x ∈ [a, b]
P = −
∫
bf(x)dx.
af : [a, b] → R
P = |f(x)|dx.
∫
a b PPRZYKŁAD
Przykład 1:
Przykład 1:
Obliczmy pole obszaru zawartego pomiędzy wykresami funkcji , , gdzie oraz osią . Zauważmy, że rozpatrywana figura jest sumą dwóch trapezów krzywoliniowych i :
więc jej pole jest równe sumie pól tych trapezów. Korzystając z interpretacji geometrycznej całki oznaczonej, otrzymujemy
Szukane pole wynosi zatem
Rysunek 2: ,
PRZYKŁAD
Przykład 2:
Przykład 2:
Obliczmy pole obszaru ograniczonego przez elipsę o półosiach i ( ) daną równaniem
P
f(x) = x + 1
√
− −
−−−
g(x) = (x − 1)
2x ∈ [−1, 1],
OX
T
1T
2= {(x, y) ∈
: 0 ≤ y ≤
, x ∈ [−1, 0]},
= {(x, y) ∈
: 0 ≤ y ≤ (x − 1 , x ∈ [0, 1]},
T
1R
2√
− −
x + 1
−−−
T
2R
2)
2P
P
T1+
P
T2P
T1P
T2=
∫
dx = (x + 1
= ,
−1 0x + 1
− −
−−−
√
2
3
)
32∣∣
0 −12
3
= (x − 1 dx = (x − 1
∫
= .
0 1)
21
3
)
3∣∣
1 01
3
P = + = 1.
2 3 13 = f(x)dx PT1 ∫ −1 0 = g(x)dx PT2 ∫ 0 1a b a, b > 0
+
= 1.
x2 a2 y 2 b2Rysunek 3: Obszar ograniczony przez elipsę
Na początku zauważmy, że rozważany obszar jest symetryczny względem osi układu współrzędnych, a więc możemy go podzielić na cztery obszary o identycznych polach. Pole części leżącej w pierwszej ćwiartce układu współrzędnych zawarte jest między osiami i oraz częścią krzywej zadanej przepisem
Jest to więc pole figury będącej trapezem krzywoliniowym. Wówczas gdzie
Obliczmy tę całkę poprzez zamianę zmiennych w całce oznaczonej. Niech więc
Zauważmy, że , czyli zawiera się w dziedzinie funkcji cyklometrycznej arcus sinus, a więc nowa zmienna jest poprawnie określona. Ponieważ funkcja arcus sinus jest funkcją rosnącą, to jeżeli zmienia się od do , to wartości rosną od do . Mamy więc
Tabela 1: Zmiana wartości granic całkowania, gdy {OPENAGHMATHJAX (type
Wówczas
a więc
Powołując się na twierdzenie o całkowaniu przez podstawienie, otrzymujemy
Ostatecznie pole figury ograniczonej przez elipsę o półosiach i wynosi .
+ = 1 x2 a2 y2 b2
OX OY
f(x) = b
1 −
x2, gdzie x ∈ [0, a].
a2− −
−−−
√
P = 4 ,
P
1= f(x)dx = b
dx.
P
1∫
0 a∫
0 a1 −
x2 a2− −
−−−
√
t = arcsin
xdla x ∈ [0, a].
a
∈ [0, 1]
x a xat
x
0 a
t
0
π 2x 0 a
t 0
π 2x = a sin t dla t ∈ [0, ],
π 2dx = a cos t dt.
P = 4b
∫
a cos tdt = 4ab
tdt = 4ab
(1 + cos 2t)dt
0 π 2
1 −
sin
2t
−
−−−−−
−
√
∫
0 π 2cos
2∫
0 π 21
2
= 2ab(t +
sin 2t
2
) = 2ab( +
∣∣
π2− 0) = πab.
0
π
2
sin π
2
WNIOSEK
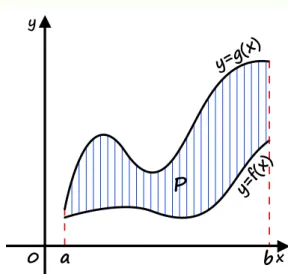
Wniosek 1: o polu figury ograniczonej przez wykresy dwóch funkcji oraz proste
Wniosek 1: o polu figury ograniczonej przez wykresy dwóch funkcji oraz proste
pionowe
pionowe
Jeżeli oraz są funkcjami ciągłymi, a ponadto dla każdego , to pole figury ograniczonej przez wykresy tych funkcji oraz proste i wyraża się wzorem
Rysunek 4: Pole figury ograniczonej przez wykresy funkcji i oraz proste i
f : [a, b] → R
g : [a, b] → R
f(x) ≤ g(x)
x ∈ [a, b]
P
x = a x = b
P = (g(x) − f(x))dx.
∫
a b
PRZYKŁAD
Przykład 3:
Przykład 3:
Znajdźmy pole figury zawartej między wykresami funkcji i oraz prostą
Rysunek 5: Pole figury zawartej między wykresami funkcji i oraz prostą
Dla każdego zachodzi nierówność więc szukane pole obliczamy w następujący sposób:
f(x) = e
−xg(x) = e
xx = 1.
P f g x = 1x ∈ [0, 1]
f(x) ≤ g(x),
P = ( −
∫
) dx = ( +
) = e +
− 2.
0 1e
xe
−xe
xe
−x∣∣
1 0e
−1PRZYKŁAD
Przykład 4:
Przykład 4:
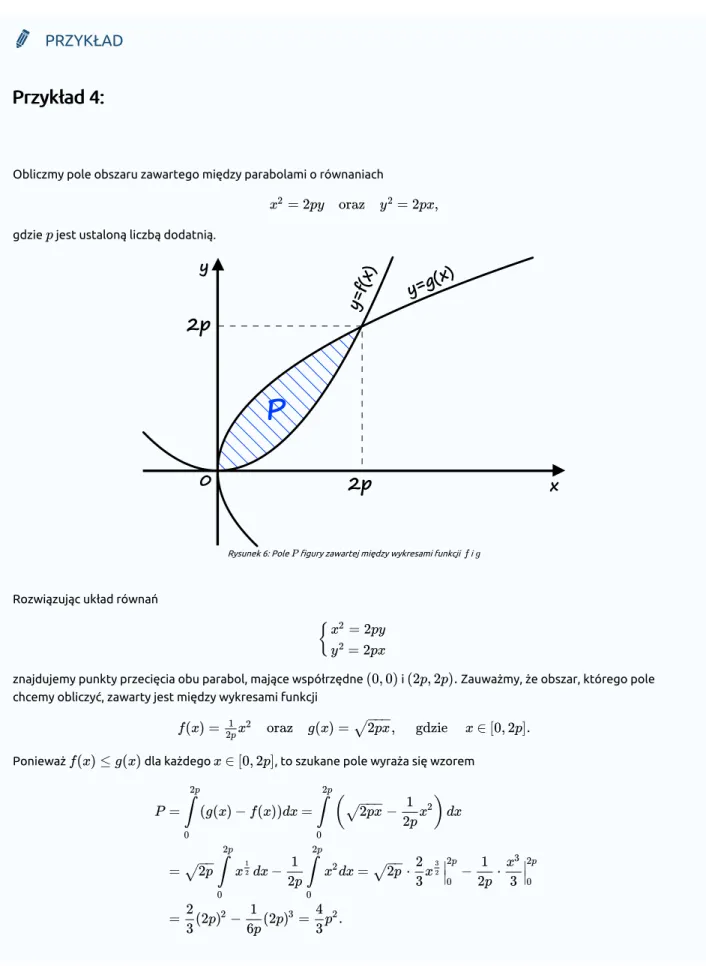
Obliczmy pole obszaru zawartego między parabolami o równaniach
gdzie jest ustaloną liczbą dodatnią.
Rysunek 6: Pole figury zawartej między wykresami funkcji i
Rozwiązując układ równań
znajdujemy punkty przecięcia obu parabol, mające współrzędne i Zauważmy, że obszar, którego pole chcemy obliczyć, zawarty jest między wykresami funkcji
Ponieważ dla każdego , to szukane pole wyraża się wzorem
Aby obliczyć pole figury płaskiej przy pomocy całki oznaczonej, w pewnych sytuacjach warto jest całkować względem zmiennej zamiast zmiennej . Pozwala to uniknąć dzielenia danego obszaru na mniejsze obszary oraz niepotrzebnego obliczania kilku całek.
= 2py oraz
= 2px,
x
2y
2p
P f g{ = 2py
x
2= 2px
y
2(0, 0) (2p, 2p).
f(x) =
1oraz g(x) =
, gdzie x ∈ [0, 2p].
2px
2√
2px
− −
−
f(x) ≤ g(x)
x ∈ [0, 2p]
P = (g(x) − f(x))dx =
∫
(
−
) dx
0 2p∫
0 2p2px
− −
−
√
2p x
1
2=
√ ∫
2p
−−
dx −
dx =
⋅
−
⋅
0 2px
121
2p ∫
0 2px
2√
−−
2p
2
3 x
3 2∣∣
2p 01
2p
x
33
∣∣
2p 0= (2p −
2
3
)
21
(2p =
.
6p
)
34
3 p
2y
x
PRZYKŁAD
Przykład 5:
Przykład 5:
Pokażemy drugi sposób na znalezienie pola obszaru z przykładu 1. Zauważmy (rys. 2), że zadany obszar jest zbiorem
a jego pole obliczamy w następujący sposób:
Omówimy teraz sposób wyznaczania pola figury ograniczonej przez krzywą zadaną parametrycznie. Najpierw jednak podajmy definicję takiej krzywej.
DEFINICJA
Definicja 1: Krzywa zadana parametrycznie
Definicja 1: Krzywa zadana parametrycznie
Mówimy, że jest krzywą zadaną parametryczniekrzywą zadaną parametrycznie, jeżeli istnieją takie funkcje ciągłe oraz , że
TWIERDZENIE
Twierdzenie 1:
Twierdzenie 1: o polu obszaru ograniczonego łukiem krzywej zadanej
o polu obszaru ograniczonego łukiem krzywej zadanej
parametrycznie
parametrycznie
Niech będzie krzywą zadaną parametrycznie, jak jest to opisane w definicji Krzywa zadana parametrycznie. Załóżmy dodatkowo, że funkcja jest rosnąca i ma w każdym punkcie przedziału ciągłą pochodną, a funkcja jest nieujemna. Pole obszaru ograniczonego łukiem krzywej , odcinkiem osi OX oraz prostymi , , gdzie , , wyraża się wzorem
DOWÓD DOWÓD
W pierwszym kroku dowodu wykażemy, że przy przyjętych założeniach możemy wyrazić krzywą jako wykres funkcji ciągłej zmiennej na przedziale . Istotnie, ponieważ funkcja jest rosnąca w przedziale to
a ponadto funkcja ta jest odwracalna. To z kolei implikuje, że dla (gdzie oznacza funkcję odwrotną do ), co po podstawieniu do równania daje
Dalej, skoro funkcja jest nieujemna, to w konsekwencji funkcja zależna od zmiennej przyjmuje wartości nieujemne. Dzięki temu pole rozpatrywanego obszaru możemy obliczyć, stosując wzór
{(x, y) ∈
R
2:
y
2− 1 ≤ x ≤ −
√
y
+ 1, y ∈ [0, 1]},
P = (−
∫
+ 1 − + 1) dy = ( −
−
+ 2y) = − − + 2 = 1.
0 1y
√
y
2 2 3y
3 2 13y
3∣∣
1 0 23 13Γ
φ : [α, β] → R
ψ : [α, β] → R
Γ = {(x, y) ∈
R
2: x = φ(t), y = ψ(t) dla t ∈ [α, β]}.
Γ
φ
[α, β]
ψ
P
Γ
x = a x = b
a = φ(α) b = φ(β)
P = ψ(t) (t)dt.
∫
α βφ
′Γ
x
[a, b]
φ
[α, β],
a = φ(α) ≤ φ(β) = b,
t =
φ
−1(x)
x ∈ [a, b]
φ
−1φ
y = ψ(t)
y = ψ(
φ
−1(x)) dla x ∈ [a, b].
ψ
y
x
P = y(x)dx = ψ(
b b −1(x))dx.
Aby obliczyć ostatnią całkę, zastosujmy twierdzenie o całkowaniu przez podstawienie dla , pamiętając przy tym o stosownej zmianie granic całkowania. Z równania , gdzie dostajemy . W rezultacie
CND. CND.
PRZYKŁAD
Przykład 6:
Przykład 6:
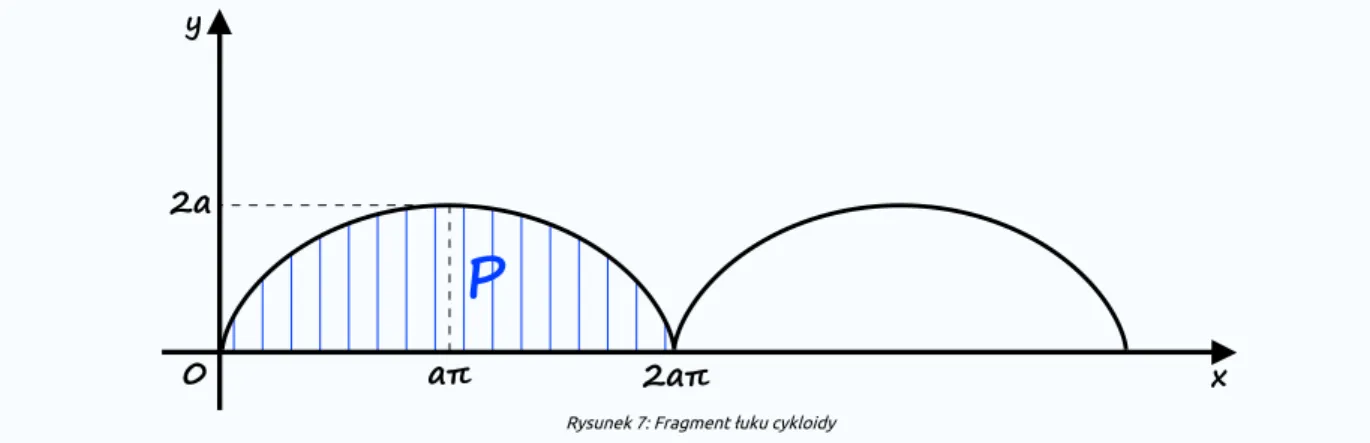
Obliczymy pole obszaru ograniczonego osią i jednym łukiem krzywej zwanej cykloidącykloidą , która zadana jest równaniami parametrycznymi
gdzie jest ustaloną liczbą dodatnią. Wyjaśnijmy, że cykloida to krzywa opisująca tor ruchu punktu leżącego na obwodzie koła o promieniu , które toczy się bez poślizgu po prostej. Zauważmy, że wartości powtarzają się cyklicznie, gdy parametr przebiega każdy z przedziałów gdzie jest liczbą całkowitą. Dla naszych potrzeb wybierzmy jeden z takich przedziałów, np.
Rysunek 7: Fragment łuku cykloidy
Zauważmy, że dla każdego więc spełnione są założenia twierdzenia o polu obszaru ograniczonego łukiem krzywej zadanej parametrycznie. Na jego podstawie otrzymujemy
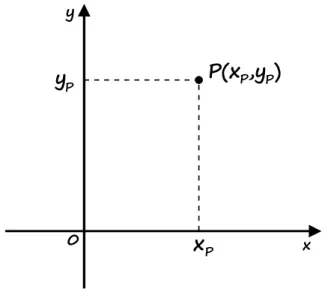
Jak wiadomo, położenie punktu na płaszczyźnie można określić dzięki wprowadzeniu na płaszczyźnie kartezjańskiegokartezjańskiego prostokątnego układu współrzędnych
prostokątnego układu współrzędnych. Wówczas położenie punktu jest jednoznacznie określone poprzez podanie pary , gdzie jest współrzędną tego punktu względem osi , zaś względem osi .
P = y(x)dx = ψ(
∫
(x))dx.
a b∫
a bφ
−1t =
φ
−1(x)
x = φ(t)
t ∈ [α, β],
dx = (t)dt
φ
′P = ψ(t) (t)dt.
∫
α βφ
′OX
{ x = φ(t) := a(t − sin t),
y = ψ(t) := a(1 − cos t),
a
a
y = ψ(t)
t
[2kπ, 2(k + 1)π],
k
[0, 2π].
(t) = ψ(t) ≥ 0
φ
′t ∈ [0, 2π],
P =
∫
ψ(t) (t)dt =
a(1 − cos t) ⋅ a(1 − cos t)dt
0 2π
φ
′∫
0 2π=
a
2∫
(1 − cos t dt =
(1 − 2 cos t +
t)dt
0 2π)
2a
2∫
0 2πcos
2=
a
2⎛
(t − 2 sin t) +
(1 + cos 2t)dt
⎝
⎜
∣∣
2π0∫
0 2π1
2
⎞
⎠
⎟
= (2π + (t +
a
21
) ) = (2π + π) = 3π .
2
sin 2t
2
∣∣
2π 0a
2a
2P
( , )
x
Py
Px
POX
y
POY
Rysunek 8: Położenie punktu na płaszczyźnie opisane w kartezjańskim prostokątnym układzie współrzędnych
Jednakże położenie punktu na płaszczyźnie można też określić w inny sposób - dzięki wprowadzeniu tzw. biegunowegobiegunowego (polarnego) układu współrzędnych
(polarnego) układu współrzędnych. Jest ono jednoznacznie określone poprzed podanie odległości od pewnego wyróżnionego na płaszczyźnie punktu zwanego biegunembiegunem oraz poprzez podanie kąta pomiędzy półprostą o początku w biegunie i przechodzącą przez punkt a inną wyróżnioną półosią o początku w biegunie, zwaną półosią biegunową. (Kąty skierowane przeciwnie do ruchu wskazówek zegara są dodatnie, a zgodnie z ruchem wskazówek zegara są ujemne).
Rysunek 9: Położenie punktu na płaszczyźnie opisane przy użyciu biegunowego układu współrzędnych
Jeżeli umieścimy biegun w punkcie , czyli w początku układu kartezjańskiego, zaś jako półoś biegunową przyjmiemy półoś dodatnią osi , to wówczas związki między obydwoma układami wyrażą się w następujący sposób:
Rysunek 10: Związek między opisem położenia punktu na płaszczyźnie w kartezjańskim prostokątnym układzie współrzędnych a w biegunowym układzie współrzędnych
P
φ
P
(0, 0)
OX
{
xr= cos φ,
= sin φ.
y rW rezultacie
PRZYKŁAD
Przykład 7:
Przykład 7:
Równanie półokręgu o środku w punkcie i promieniu ma postać , przy czym Ta sama krzywa we współrzędnych biegunowych ma równanie , przy czym
PRZYKŁAD
Przykład 8:
Przykład 8:
Krzywa zadana równaniem ze względu na związki ma we współrzędnych biegunowych równanie
czyli
Omówimy teraz, w jaki sposób można obliczyć pole figury ograniczonej, której fragment brzegu jest zadany za pomocą współrzędnych biegunowych.
DEFINICJA
Definicja 2: Krzywa zadana biegunowo
Definicja 2: Krzywa zadana biegunowo
Mówimy, że jest krzywą zadaną biegunowokrzywą zadaną biegunowo , jeżeli istnieje nieujemna funkcja ciągła taka, że
Zauważmy, że krzywą zadaną biegunowo można przedstawić w następujący sposób w postaci parametrycznej (w zależności od parametru ):
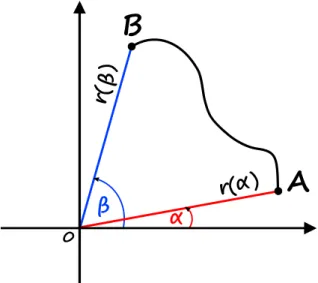
Niech oraz załóżmy, że Wtedy promienie wodzące o amplitudach i , czyli odcinki i , oraz łuk krzywej wyznaczają obszar zilustowany na poniższym rysunku.
{ x = r cos φ,
y = r sin φ.
(0, 0)
4
x
2+ = 4
y
2y ≥ 0.
r = 2
φ ∈ [0, π].
( +
x
2y
2)
2= 2xy
x = r cos φ, y = r sin φ
= 2 sin φ cos φ,
r
4r
2= sin 2φ.
r
2Γ
r : [α, β] → R
Γ = {(r, ϕ) ∈
R
2: r = r(ϕ), ϕ ∈ [α, β]}.
ϕ
x = r(ϕ) cos ϕ oraz y = r(ϕ) sin ϕ, gdzie ϕ ∈ [α, β].
O = (0, 0), A = (r(α), α), B = (r(β), β)
0 < β − α < 2π.
Rysunek 11: Trapez krzywoliniowy w sensie biegunowego układu współrzędnych
Taki obszar nazywamy trapezem krzywoliniowym w sensie biegunowego układu współrzędnych. Jego pole możemy obliczyć korzystając z następującego twierdzenia.
TWIERDZENIE
Twierdzenie 2:
Twierdzenie 2: o polu obszaru ograniczonego łukiem krzywej zadanej biegunowo
o polu obszaru ograniczonego łukiem krzywej zadanej biegunowo
oraz dwoma promieniami wodzącymi
oraz dwoma promieniami wodzącymi
Niech będzie krzywą zadaną biegunowo. Pole obszaru ograniczonego łukiem krzywej oraz promieniami wodzącymi o amplitudach i wyraża się wzorem
DOWÓD DOWÓD
Dla każdego podzielmy przedział na podprzedziałów tak dobierając punkty aby zachodziła zależność
W ten sposób otrzymujemy trójkątów krzywoliniowych zawartych między łukiem krzywej oraz promieniami wodzącymi o amplitudach i Oznaczmy przez długość odcinka tzn.
gdzie Niech będzie największą ze średnic wszystkich przedziałów czyli
Następnie dla każdego wybierzmy kąt pośredni Przy małych wartościach pole -tego trójkąta jest w przybliżeniu równe polu wycinka kołowego o promieniu i kącie środkowym wyrażającego się wzorem
gdzie jest miarą łukową tego kąta środkowego. Oznaczmy przez sumę pól wszystkich tych wycinków. Wówczas
Przechodząc do granicy (jak w konstrukcji całki oznaczonej Riemanna), otrzymujemy
Γ
P
Γ
α β
P =
1(ϕ)dϕ.
2∫
α βr
2n ∈ N
[α, β] n
[
ϕ
k−1, ]
ϕ
k(k = 1, …, n)
ϕ
k,
α =
ϕ
0<
ϕ
1<
ϕ
2< … <
ϕ
n= β.
n
Γ
ϕ
k−1ϕ
k.
Δϕ
k[
ϕ
k−1, ],
ϕ
kΔ =
ϕ
kϕ
k−
ϕ
k−1,
k ∈ {1, …, n}.
δ
n[
ϕ
k−1, ],
ϕ
k= max{Δ : k = 1, …, n}.
δ
nϕ
kk ∈ {1, …, n}
ξ
k∈ [
ϕ
k−1, ].
ϕ
kΔϕ
kk
P
kr( )
ξ
kΔ ,
ϕ
k=
( )Δ ,
P
k 12r
2ξ
kϕ
kΔϕ
kP
n=
=
( )Δ .
P
n∑
k=1 nP
k∑
k=1 n 1 2r
2ξ
kϕ
kP =
n=
2( )Δ =
k k(ϕ)dϕ.
β 2CND. CND.
Zastosujmy powyższy wzór do obliczenia pola figury ograniczonej przez krzywą zadaną biegunowo.
PRZYKŁAD
Przykład 9:
Przykład 9:
Wyznaczmy pole figury ograniczonej przez kardioidękardioidę, czyli krzywą zdefiniowaną biegunowo za pomocą przepisu
przy czym jest ustaloną liczbą dodatnią. Aby narysować tę krzywą, skorzystajmy ze znajomości wykresu funkcji cosinus. Otóż, gdy wartości kąta rosną od do , to wartości cosinusa maleją od do , a więc promień maleje od
do . Z kolei, gdy rośnie od do , to wartości funkcji cosinus maleją od do , a więc promień maleje od do . Ponadto promień rośnie od do dla kąta zmieniającego się od do . Ponieważ wykres funkcji cosinus jest symetryczny względem osi , to kardioida jest symetryczna względem osi .
Rysunek 12: Kardioida
Korzystając z twierdzenia o polu obszaru ograniczonego łukiem krzywej zadanej biegunowo oraz dwoma promieniami wodzącymi i symetrii rozpatrywanego obszaru względem osi , otrzymujemy
Publikacja udostępniona jest na licencji Creative Commons Uznanie autorstwa - Na tych samych warunkach 3.0 Polska. Pewne prawa zastrzeżone na rzecz autorów i Akademii Górniczo-Hutniczej. Zezwala się na dowolne wykorzystanie treści publikacji pod warunkiem wskazania autorów i Akademii Górniczo-Hutniczej jako autorów oraz podania informacji o licencji tak długo, jak tylko na utwory zależne będzie udzielana taka sama licencja. Pełny tekst licencji dostępny na stronie
http://creativecommons.org/licenses/by-sa/3.0/pl/.
P =
n→∞lim
P
n=
n→∞lim
∑
( )Δ =
(ϕ)dϕ.
k=1 n 1 2r
2ξ
kϕ
k 12∫
α βr
2r = a(1 + cos ϕ), gdzie ϕ ∈ [−π, π],
a
ϕ
0
π2
0 −1
r
a(1 + cos 0) = 2a
a(1 + cos ) = a
π2
ϕ
π2π
1 −1
r
a
a(1 + cos π) = 0
r
0 2a
ϕ
−π
0
OY
OX
OX
P = 2 ⋅
1
2 ∫
(ϕ)dϕ =
(1 + cos ϕ dϕ =
(1 + 2 cos ϕ +
ϕ)dϕ
α βr
2∫
0 πa
2)
2a
2∫
0 πcos
2= [ϕ + 2 sin ϕ +
a
2∣∣
π(1 + cos 2ϕ)dϕ ] = [π + ϕ + ⋅
]
0∣∣
π 0∫
0 π1
2
a
21
2
∣∣
π 01
2
sin 2ϕ
2
∣∣
π 0= 2 [π + ] = 3π .
a
2π
2
a
2Data generacji dokumentu: 2019-04-16 01:27:06
Oryginalny dokument dostępny pod adresem: https://epodreczniki.open.agh.edu.pl/openagh-permalink.php? link=8f4c3d2979454d36dce38ea5accc4d0c