Równania różniczkowe
zwyczajne
Autorzy:
Vsevolod Vladimirov
Julian Janus
2019
Spis treści
Spis treści
Skalarne równania różniczkowe zwyczajne. Pojęcia wstępne Równania różniczkowe rzędu pierwszego o zmiennych rozdzielonych
Równania różniczkowe rzędu pierwszego, które sprowadzają się do równań o zmiennych rozdzielonych Przykłady równań różniczkowych wykorzystywanych w naukach przyrodniczych
Zagadnienie początkowe (zagadnienie Cauchy'ego). Poprawność zadania warunków początkowych Liniowe równania różniczkowe rzędu pierwszego
Metoda Eulera
Równania różniczkowe liniowe wyższych rzędów - podstawowe pojęcia Liniowa zależność i niezależność funkcji
Fundamentalny zbiór rozwiązań dla równań różniczkowych liniowych wyższych rzędów
Wyznaczanie fundamentalnego zbioru rozwiązań równań różniczkowych liniowych jednorodnych drugiego rzędu, gdy znamy jedno rozwiązanie
Wyznaczanie fundamentalnego zbioru rozwiązań równań różniczkowych liniowych jednorodnych drugiego rzędu o stałych współczynnikach
Wyznaczanie fundamentalnego zbioru rozwiązań równań różniczkowych liniowych jednorodnych o stałych współczynnikach rzędu wyższego niż dwa
Rozwiązywanie równań różniczkowych liniowych niejednorodnych wyższych rzędów metodą uzmieniania stałych Przykłady rozwiązywania równań różniczkowych liniowych niejednorodnych wyższych rzędów o stałych współczynnikach metodą uzmienniania stałych
Rozwiązywanie równań różniczkowych liniowych niejednorodnych wyższych rzędów o stałych współczynnikach metodą przewidywań
Przykłady zastosowań równań różniczkowych liniowych rzędu drugiego
Równania różniczkowe rzędu drugiego sprowadzalne do równań rzędu pierwszego Równania różniczkowe Eulera
Rozwiązywanie układów równań różniczkowych metodą operatorową (sprowadzanie układu równań do równania zwyczajnego rzędu wyższego)
Przykłady rozwiązywania układów równań różniczkowych metodą operatorową
Przykład rozwiązywania układów równań z warunkami początkowymi metodą operatorową Układ normalny równań różniczkowych rzędu pierwszego
Układy równań różniczkowych liniowych rzędu pierwszego
Rozwiązywanie układów równań liniowych jednorodnych o stałych współczynnikach, gdy wartości własne są rzeczywiste i jednokrotne
Rozwiązywanie układów równań liniowych jednorodnych o stałych współczynnikach, gdy wartości własne są jednokrotne, ale nie wszystkie rzeczywiste
Rozwiązywanie układów równań liniowych jednorodnych o stałych współczynnikach, gdy macierz układu jest diagonalizowalna
Rozwiązywanie układów równań liniowych jednorodnych o stałych współczynnikach, gdy macierz układu nie jest diagonalizowalna
Przykłady rozwiązywania układów równań liniowych jednorodnych o stałych współczynnikach, gdy macierz układu nie jest diagonalizowalna
Macierz wykładnicza i jej własności Wyznaczanie macierzy wykładniczej
Przykłady rozwiązywania układów równań liniowych jednorodnych o stałych współczynnikach przy użyciu macierzy wykładniczej
Przykłady rozwiązywania układów równań liniowych niejednorodnych o stałych współczynnikach metodą uzmienniania stałych
Rozwiązywanie układów równań liniowych niejednorodnych o stałych współczynnikach metodą przewidywań
Przykłady rozwiązywania układów równań liniowych niejednorodnych o stałych współczynnikach metodą przewidywań Przykłady zastosowania układów równań różniczkowych
Układy dynamiczne. Klasyfikacja punktów stacjonarnych na płaszczyźnie Pojęcie całkowania jakościowego. Układy hamiltonowskie na płaszczyźnie Analiza jakościowa równania Duffinga
Analiza jakościowa równania opisującego ruch płaski wahadła matematycznego Nieliniowe rozwiązania okresowe w dwuwymiarowym układzie dynamicznym Warunki powstania cyklu granicznego w równaniu typu Van der Pola Skalarne quasiliniowe równanie cząstkowe
Rozwiązanie ogólne równania quasiliniowego w przypadku funkcji dwóch zmiennych niezależnych Przykłady znajdowania rozwiązania ogólnego równania quasiliniowego o dwóch zmiennych niezależnych Rozwiązywanie zagadnienia początkowego równania quasiliniowego o dwóch zmiennych niezależnych
Skalarne równanie quasiliniowe dla funkcji n zmiennych niezależnych
Twierdzenia o istnieniu i jednoznaczności dla równań różniczkowych zwyczajnych Stabilność rozwiązań równań różniczkowych zwyczajnych
(1)
(2)
(3)
(4)
Skalarne równania różniczkowe zwyczajne. Pojęcia
Skalarne równania różniczkowe zwyczajne. Pojęcia
wstępne
wstępne
Czym są równania różniczkowe i do czego one służą? Zacznijmy od pewnych analogii. W kursie matematyki elementarnej rozwiązuje się równania algebraiczne. Przykładem może służyć układ równań liniowych
lub równanie
zwane równaniem kwadratowym. Rozwiązywanie obu równań polega na znalezieniu liczb, które po podstawieniu do
odpowiednich równań czyniły by z nich tożsamości. W przypadku układu równań w naszym przypadku są to liczby , które są określone jednoznacznie. Podane równanie kwadratowe spełniają dwie liczby: oraz . W przypadku równań różniczkowych nie chodzi o znalezienie rozwiązań liczbowych. Rozwiązaniami są funkcje różniczkowalne spełniające równanie, przy czym niejednoznaczność rozwiązania jest raczej regułą niż wyjątkiem. Przejdźmy jednak do definicji.
DEFINICJA
Definicja 1:
Definicja 1:
Równaniem różniczkowym zwyczajnym (RRZ) nazywamy równanie
gdzie jest funkcją różniczkowalną w każdym ze swoich argumentów. W równaniu ( 2 ) niewiadomą jest krotnie różniczkowana funkcja , zatem równanie ( 2 ) jest równaniem funkcyjnym.
Jeżeli jesteśmy w stanie rozwiązać równanie ( 2 ) względem ostatniej zmiennej, wówczas możemy go napisać w postaci równoważnej
zwanej postacią kanoniczną skalarnego RRZ -tego rzędu.
Rozwiązać równanie ( 2 ) oznacza znaleźć razy różniczkowalną funkcję , która, będąc podstawioną do równania ( 2 ), uczyni z niego tożsamość. Rzędem równania ( 2 ) nazywamy największy rząd pochodnej szukanej funkcji , występującej w tym równaniu.
Najprostsze równanie różniczkowe dyktuje problem znalezienia funkcji pierwotnej do zadanej funkcji ciągłej :
Zatem rozwiązanie tego równania dane jest wzorem
opisującym nieskończenie wiele funkcji pierwotnych funkcji , rózniących się o dowolną stałą.
{ x + y = 1,
x − y = 0
− x − 6 = 0,
x
2x = y = 1/2
x = 3
x = −2
F(t, x(t), (t), …,
x
′x
(n)(t)) = 0,
F
n−
x = x(t)
= Ψ (t, x(t), x(t), . . . ,
) ,
x
(n)x
(n−1)n
n
x = φ(t)
x = φ(t)
x(t)
f(t)
= f(t).
d x d tx(t) = ∫ f(t) dt,
x(t)
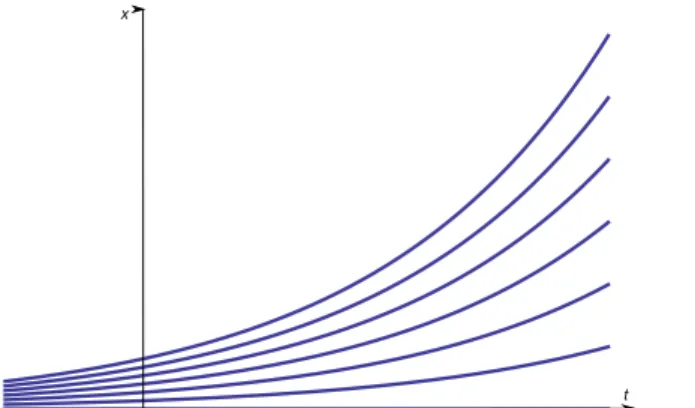
(5) (6) (7) - 4 - 2 0 2 t 2 4 6 8 10 12 X(t)
Rysunek 1: Fragmenty funkcji pierwotnych funkcji
PRZYKŁAD
Przykład 1:
Przykład 1:
Dane jest równanie różniczkowe zwyczajne rzędu pierwszego z funkcją niewiadomą :
Powyższe równanie można zapisać w sposób równoważny jako równość różniczek
Jak wiadomo, równość różniczek implikuje równość odpowiednich całek, w danym przypadku równość ta będzie miała postać
Licząc odpowiednie całki otrzymamy
Zatem funkcja , spełniająca RRZ ( 5 ) nie jest zadana jednoznacznie, lecz z dokładnością do dowolnej stałej (stałej całkowania).
Sens geometryczny stałej występującej w powyższym wzorze wynika z interpretacji pochodnej jako tangensa kąta nachylenia do osi prostej stycznej do wykresu funkcji w dowolnym punkcie (zob. Rys. 1). Stąd funkcją pierwotną będzie również każda funkcja postaci , gdzie .
Równania różniczkowe rzędu pierwszego o
Równania różniczkowe rzędu pierwszego o
zmiennych rozdzielonych
zmiennych rozdzielonych
Równanie rzędu pierwszego można na ogół rozwikłać względem zmiennej , przedstawiając go w postaci równoważnej
zwaną postacią kanoniczną RRZ rzędu 1.postacią kanoniczną RRZ rzędu 1. Takiego równania nie można scałkować przy dowolnej prawej stronie. Poniżej
przedstawimy podstawowe typy funkcji, dla których potrafimy podać rozwiązanie bądź to w postaci analitycznej bądź w postaci całek (kwadraturkwadratur).
1. Funkcja nie zależy od zmiennej :
cos t
x(t)
= cos t.
d x d tdx = cos t dt ≡ d sin t.
∫ dx = ∫ cos tdt.
x(t) = sin t + C.
x(t)
O X
(t, x(t))
x(t) + C
C = const
F(t, x(t), (t)) = 0
x
′x
′(t)
= φ(t, x),
d x d tφ
t
= φ(x).
d x d t= dt
d x(8) Przepisując równanie w postaci , a następnie całkując, otrzymujemy rozwiązanie w postaci uwikłanej:
2. Funkcja nie zależy od zmiennej :
Przepisując równanie w postaci , a następnie całkując, otrzymujemy rozwiązanie w postaci:
3. Równanie typu
Rozwiązanie sprowadza się do warunku
Oznaczenie. Wszystkie równania rozpatrzone w tym punkcie nazywamy RR rzędu 1 o zmiennych rozdzielonych.Wszystkie równania rozpatrzone w tym punkcie nazywamy RR rzędu 1 o zmiennych rozdzielonych.
Równania różniczkowe rzędu pierwszego, które
Równania różniczkowe rzędu pierwszego, które
sprowadzają się do równań o zmiennych
sprowadzają się do równań o zmiennych
rozdzielonych
rozdzielonych
Całkowanie równań różniczkowych (RR) rzędu pierwszego wiąże się, na ogół, z przedstawieniem ich w postaci równań o zmiennych rozdzielonych.
1. Równanie postaci
Stosujemy podstawienie . Różniczkując względem otrzymamy i wówczas wyjściowe równanie ma postać
lub, po rozdzieleniu zmiennych,
Całkując powyższe wyrażenie, otrzymamy
= dt
d x φ(x)∫
d x= t + C, C ∈ R.
φ(x)φ
x
= ψ(t).
d x d tdx = ψ(t) dt
x = ∫ ψ(t)dt + C.
=
.
dx dt Q(x)P(t)∫ P(t) dt = ∫ Q(x) dx.
= f(a t + b x).
d x d tz = a t + b x
z
t,
z
′= a + b
x
′= a + b f(z),
d z d t= dt.
d z a+b f(z)∫
d z= t + C.
a+b f(z)(9)
PRZYKŁAD
Przykład 2:
Przykład 2:
W tym przypadku , zaś . Podstawiając to do
powyższego równania, otrzymujemy:
Stąd otrzymujemy rozwiązanie
2. Równania jednorodne. Są to równania, które nie zmieniają kształtu przy transformacjach , gdzie jest dowolną stałą nie równą się zeru. Równanie takie może być sprowadzone do postaci
Stosujemy podstawienie . Wówczas i Otrzymamy wtedy
a po rozdzieleniu zmiennych
Całkując stronami, otrzymamy:
PRZYKŁAD
Przykład 3:
Przykład 3:
Zgodnie z powyższym wzorem , więc mamy do policzenia całkę
Wracając do zmiennej wyjściowej otrzymamy równość
Wprowadzając dogodną stałą zgodnie ze wzorem , po elementarnych przekształceniach otrzymujemy rozwiązanie
3. Do jednorodnego równania sprowadza się równanie postaci
= 2 t + x.
d x d tz = 2 t + x
z
′= 2 + ,
x
′f(z) = z
∫
d z= ln
= t.
2+z 2+zCx = C − 2 (t + 1).
e
tx → α x, t → α t
α
= f ( ) .
d x d t xtz =
x tx = z t
x
′= t + z.
z
′=
=
,
d z d t t −xx ′ t2 f(z)−zt=
.
d t t f(z)−zd zlog[ ] = ∫
t.
C f(z)−zd z= (1 + )
d x d t xt xtf(z) = z(z + 1)
∫
d z= ∫
= − .
f(z)−z z+ −zd zz2 1z= − log[ ] ≡ log C − log t.
t x Ct
= log C
C~
x =
t.
−log t C~= f (
) .
d x d t a1a2t+ x+t+ x+b1b2 c1c2(10)
(11)
(12) (13) Rozpatrzmy najpierw przypadek szczególny
Wprowadzamy podstawienie:
Ponieważ więc zatem zmienną będziemy traktować jako nową zmienną niezależną, zaś funkcja będzie nową zmienną zależną. Zauważmy że zachodzą równości oraz . Równanie można zatem przepisać w postaci
gdzie
Przypomnijmy kiedy układ równań liniowych
można rozwiązać względem zmiennych . Postać macierzowa tego układu jest następująca:
Z twierdzenia Cramera wynika, iż układ ma jedno rozwiązanie , o ile
Jeżeli warunek powyższy zachodzi, wówczas możemy w sposób jednoznaczny dobrać stałe w taki sposób że znikną. Dzieląc licznik i mianownik prawej strony równania ( 11 ) przez , otrzymamy wtedy
Jest to jednorodne równanie, które poprzez podstawienie sprowadza się do równania o zmiennych rozdzielonych. Jeżeli , wówczas nie można wyeliminować opisanym wyżej sposobem parametrów . Niemniej jednak ten przypadek również jest całkowalny. Rzeczywiście, równość oznacza, że współczynniki są proporcjonalne, tzn. istnieje stała taka że , . A zatem równanie ( 10 ) można przepisać w postaci równania ( 8 )
I tak jak w równaniu ( 8 ) wprowadzamy podstwienie otrzymując równanie
które jest równaniem o zmiennych rozdzielonych.
Przypadek ogólny, czyli równanie ( 9 ), przekształcamy w podobny sposób: jeżeli , to wówczas przechodzimy do zmiennych , , gdzie stałe
określamy jako rozwiązania układu równań
W wyniku dla funkcji otrzymujemy równanie
=
.
d x d t a1a2t+ x+t+ x+b1b2 c1c2t = r + α,
x = p + β.
x = x(t),
p = p(t),
r
p
dt = dr,
dx = dp
=
,
d p d r a1a2r+ p+r+ p+b1b2 h1h2= α + β + ,
= α + β + .
h
1a
1b
1c
1h
2a
2b
2c
2{ α + β + = 0,
a
1b
1c
1α + β + = 0
a
2b
2c
2α, β
⋅ ( ) = [
] ⋅ ( ) = − ( ) .
M^
α
β
a
a
12,
,
b
1b
2α
β
c
c
12α, β
J = det
M^
=
a
1b
2−
a
2b
1≠ 0.
α, β
h
1,
h
2r
=
= F ( ) .
d p d r + a1 b1pr + a2 b2pr p rz =
prdet M =
a
1b
2−
a
2b
1= 0
h
1,
h
2J = 0
k ≠ 0
a
1= k
a
2b
1= k
b
2=
= F( t + x).
d x d t k( t+ x)+a2a2t+ x+b2b2 c2c1a
2b
2z = t + x,
a
2b
2= F(z) + ,
d z d tb
2a
2t + x ≠ k( t + x)
a
1b
1a
2b
2ξ = t − t
0η = x − x
0t
0,
x
0+
+ = 0,
a
1t
0b
1x
0c
1+
+ = 0.
a
2t
0b
2x
0c
2η(ξ)
= f (
1ξ+ η1) = f (
1+ η/ξ1) = F [ ]
(14)
(15) jest to równanie jednorodne.
W przypadku gdy , równanie ( 9 ) można zapisać jako
Podstawienie , sprowadza go do równania o zmiennych rozdzielonych:
UWAGA
Uwaga 1:
Uwaga 1:
W przypadku gdy , równanie ( 9 ) sprowadza się do równania postaci ( 14 ).
4. Równania jednorodne uogólnione. Jest to klasa równań, które się nie zmieniają przy jednoczesnym skalowaniu zmiennej zależnej i niezależnej , gdzie -stałe. Równania takie można przedstawić w postaci
Podstawienie sprowadza równanie ( 15 ) do równania o zmiennych rozdzielonych:
Przykłady równań różniczkowych wykorzystywanych
Przykłady równań różniczkowych wykorzystywanych
w naukach przyrodniczych
w naukach przyrodniczych
= f (
) = f (
) = F [ ]
dη dξ ξ+ η a1 b1 ξ+ η a2 b2 + η/ξ a1 b1 + η/ξ a2 b2 η ξt + x = k( t + x)
a
1b
1a
2b
2= f (
) = ( t + x).
d x d t k( t+ x)+a2a2t+ x+b2b2 c2c1f
2a
2b
2z = t + x
a
2b
2=
(z) + = F(z).
d z d tb
2f
2a
2t + x = k( t + x)
a
1b
1a
2b
2t → α t, x →
α
kx
0 ≠ α, k
=
f ( ) .
d x d tt
k−1 xtkz = xt
−k=
.
d z d t f(z)−k zt(16) (17) (18) (19)
PRZYKŁAD
Przykład 4:
Przykład 4:
Model maltuzjański.Model maltuzjański. W biologii ważnym problemem jest określenie dynamiki populacji bakterii.
Otóż: niech oznacza liczebność populacji w chwili czasu . W sytuacji, gdy zasoby pokarmowe są nieograniczone, liczebność populacji w chwili w dobrym przybliżeniu opisuje wzór
gdzie jest stałą. Równość tę można przedstawić w postaci
Dokonując w powyższym równaniu przejścia granicznego
otrzymujemy równanie różniczkowe
zwane modelem maltuzjańskim dynamiki populacji.modelem maltuzjańskim dynamiki populacji. Równanie to można przedstawić w postaci równości różniczek
dla Całkując wyrażenie
(ponownie wykorzystujemy to iż równość różniczek implikuje 1 równość odpowiednich całek), otrzymamy równość
gdzie . Kładąc mamy
Jednakże spełnia równanie ( 18 ), więc spełnia równanie ( 17 ) przy dowolnej stałej
Faktycznie uzyskaliśmy nieskończenie wiele rozwiązań naszego problemu. Są one wyznaczone poprzez dobór dowolnej stałej (zgodnie z sensem biologicznym rozwiązania, ). Całość rozwiązań można przedstawić na płaszczyźnie ( ), zwanej płaszczyzną fazowąpłaszczyzną fazową (zob. Rys. 2). W jaki sposób można interpretować wzór ( 18 )? Ewolucja populacji będzie zależeć od tego, jaka była liczebność populacji w chwili początkowej .
Zadając wielkość pozbywamy się niejednoznaczności, gdyż wykorzystując warunek
otrzymamy wzór
który już jednoznacznie określa ewolucję takiej populacji, która w chwili liczyła bakterii
2
P(t) ≥ 0
t
t + Δt
P(t + Δt) = P(t) + kP(t) Δ t,
k
= kP(t).
P(t+Δt)−P(t) Δt=
,
lim
Δt→0 P(t+Δt)−P(t) Δt dP(t)dt= kP(t),
dP(t) dt= d(log |P|) = kdt = d(kt) .
dP PP ≠ 0.
d(log(P)) = d(kt)
log |P| = kt + ,
C~
∈ R
C~
C~
= log C, C > 0
P = C
e
k t.
P = 0
C ∈ R.
C
C ≥ 0
t, x
t
0P( ) =
t
0P
0P( ) =
t
0P
0= C
e
k t0,
P(t) =
P
0e
k(t− )t0,
t
0P
0t x
(20) (21) (22)
PRZYKŁAD
Przykład 5:
Przykład 5:
Dynamika punktu materialnego.
Dynamika punktu materialnego. Innym prostym przykładem jest równanie dynamiki punktu materialnego o masie . Drugie prawo Newtona daje następujący znany związek pomiędzy masą , siłą a przyspieszeniem :
W przypadku jednowymiarowym wszystkie trzy wielkości są wielkościami skalarnymi. Oznaczamy je wówczas przez Jeżeli założymy że to dostaniemy, po podzieleniu przez , równanie
. Jak wiadomo, przyspieszenie określa szybkość zmiany prędkości punktu materialnego w chwili , a jego precyzyjna definicja jest następująca:
Z kolei, prędkość określa się jako szybkość zmiany położenia przestrzennego punktu materialnego:
Daje to zatem równanie
czyli Mamy więc w tym przypadku do czynienia z równaniem różniczkowym zwyczajnym rzędu drugiego.
Równanie to całkuje się w dwóch krokach. Pierwszym krokiem jest całkowanie równania , które jest równoważne
równaniu . Całkując je otrzymamy
gdzie jest dowolną stałą całkowania.
Na drugim kroku wykorzystujemy to że z ( 21 ), wynika równość różniczek , która z kolei implikuje równość całek
gdzie są dowolnymi stałymi. Zatem ruch jednowymiarowy punktu materialnego w przypadku braku sił ( ) określa się wzorem
Ważnym wnioskiem wynikającym z powyższego przykładu jest, że przy znajdowaniu rozwiązania równania , które jest najprostszym skalarnym równania różniczkowego zwyczajnego rzędu 2, musieliśmy dwa razy zastosować procedurę całkowania i stąd w rozwiązaniu
( 22 ) pojawiły się dwie dowolne stałe. Należy więc założyć, iż w przypadku równania -go rzędu
znalezienie rozwiązania będzie wymagać -krotnego całkowania, a to z kolei wyprodukuje nam dowolnych stałych. Domniemanie to jest jak najbardziej słuszne: prawdziwe jest następujące twierdzenie.
m
m
F⃗
a⃗
m = .
a⃗ F⃗
m, F, a.
F = 0,
m ≠ 0
a = 0
v
t
a(t) =
Δt→0lim
v(t+Δt)−v(t)Δt=
d v(t)d t= (t).
v
′v(t)
x(t)
v(t) =
lim
=
= (t).
Δt→0 x(t+Δt)−x(t) Δt d x(t)d tx
′a = v(t) =
d=
= 0,
d t d td d x(t)d t d x(t) 2 d t2= 0.
x d2 dt2= 0
d v(t) d tdv = 0 ∗ dt = 0
v(t) =
d x(t)d t= ,
C
1C
1dx = d( t)
C
1∫ dx = x = ∫ d( t) =
C
1C
0+
C
1t,
,
C
0C
1F = 0
x(t) =
C
0+
C
1t,
,
∈ R.
C
0C
1d x(t)/d = 0
2t
2n
n
n
(23)
TWIERDZENIE
Twierdzenie 1:
Twierdzenie 1:
Rozwiązanie ogólneogólne skalarnego równania różniczkowego zwyczajnego rzędu zależy
od dowolnych stałych (tzw. stałych całkowania). Stałych całkowania jest dokładnie tyle, ile wynosi rząd równania. Wróćmy teraz do rozwiązania ( 22 ), równania ( 21 ) i zadajmy sobie pytanie odnośnie jego praktycznego
wykorzystania w celu przewidywania położenia punktu materialnego w ruchu jednostajnym prostoliniowym. Otóż, żeby wyeliminować nieoznaczoności tkwiące w tym
równaniu w postaci dowolności stałych całkowania, musimy dodatkowo znać zarówno położenie , w którym znajdował się punkt materialny w chwili początkowej , jak i prędkość , z jaką punkt się
porusza. Daje to układ równań algebraicznych
z którego możemy łatwo określić stałe :
A zatem położenie w czasie punktu materialnego spełniającego zadane warunki początkowe
jest jednoznacznie określone wzorem
Przypisy
Przypisy
1. Teza ta jest poprawna tylko wówczas gdy po różne strony równości stoją funkcje tylko jednego argumentu, innymi słowami, zmienne się nie mieszają
2. Rozwiązanie ( 19 ) mówi nam, iż populacja bakterii rośnie z czasem w sposób wykładniczy. Prowadzi to do
wiadomego paradoksu: w skończonym czasie niewielka populacja bakterii rozrasta się do tego stopnia, iż pokrywa metrową warstwą kulę ziemską. Jest to związane
z założeniem o nieograniczonej bazie pokarmowej oraz braku czynników powodujących kurczenie się populacji. Oba te założenia nie są prawdziwe, niemniej jednak
równanie ( 17 ) jest użyteczne, gdyż opisuje poprawnie początkowe stadium rozwoju populacji, w którym 'walka' o pokarm oraz inne
czynniki powodujące spowolnienie wzrostu nie są jeszcze istotne. Bardziej realistycznym modelem uwzględniającym powyższe czynniki naturalnego spowolnienia
jest równanie postaci
zwane równaniem logistycznym.równaniem logistycznym.
Zagadnienie początkowe (zagadnienie Cauchy'ego).
Zagadnienie początkowe (zagadnienie Cauchy'ego).
Poprawność zadania warunków początkowych
Poprawność zadania warunków początkowych
n
n
x
0t
0v
0x( ) =
t
0C
0+
C
1t
0= ,
x
0x
′( ) =
t
0C
1= ,
v
0,
C
0C
1=
−
,
= .
C
0x
0v
0t
0C
1v
0t
x( ) = ,
t
0x
0x
′( ) =
t
0v
0x(t) =
x
0+ (t − ).
v
0t
0= k P(t) (1 −
) = 0,
dP(t) d t P(t)C1(24)
(25) Powstaje pytanie: co należy zrobić, by rozwiązanie skalarnego RRZ nie zależało od dowolnych stałych? W innym sformułowaniu pytanie to brzmi następująco: przy jakich warunkach rozwiązanie RRZ będzie jednoznaczne? Otóż, skoro rozwiązanie ogólne skalarnego RRZ -go rzędu zależy od dowolnych stałych, to, żeby otrzymać rozwiązanie jednoznaczne, wystarczy, jak się wydaje, podać dodatkowych warunków algebraicznych. Domniemanie to jest słuszne w większości przypadków, z którymi stykamy się w praktyce.
Jednak w pewnych wyjątkowych sytuacjach, a mianowicie wówczas, gdy dane początkowe są zadane niepoprawnie, rozwiązanie wciąż będzie niejednoznaczne. Może też powstać sytuacja, że przy źle postawionych danych początkowych rozwiązanie nie będzie w ogóle istnieć.
Dla przykładu rozpatrzmy następujące równanie:
Równanie to można przepisać w postaci równości
które ma równowazną postać różniczkową
Implikuje to następujący ciąg równości:
Podstawiając funkcję do równania wyjściowego, możemy przekonać się, że czyni ona z niego tożsamość. Lewa strona:
Prawa strona:
Zatem
zadając warunek początkowy w postaci
i rozwiązując równanie algebraiczne względem , otrzymamy jedyne rozwiązanie Zadając warunek początkowy
otrzymamy niedorzeczność: Przyczyną tego jest nieokreśloność prawej strony równania przy . Warunek początkowy
jest spełniony przy dowolnej wartości stałej .Przyczynę tego można zrozumieć, gdy rozpatrzymy zbiór wszystkich możliwych rozwiązań równania ( 24 ) postaci ( 25 ). Obrazuje go na płaszczyźnie fazowej pęk linii prostych przechodzących przez początek współrzędnych, (zob. Rys. 3). Widzimy że początek współrzędnych jest jedynym punktem na płaszczyźnie, przez który przechodzą wszystkie rozwiązania równania. Dlatego właśnie zadanie warunków początkowych w tym punkcie prowadzi do nieijednoznaczności.
n
n
n
= .
d x d t xt= ,
d x x d ttdlog x = dlog t.
∫ dlog x = ∫ dlog t ⇔ log x = log t + log C ⇔ x = Ct, C ∈ R.
x = C t
= C,
d (C t) d t=
= C.
x(t) t C ttx( ) = a, gdzie
t
0t
0≠ 0,
x( ) = a = C
t
0t
0C
x(t) = a .
t0tx(0) = b ≠ 0,
b = C ⋅ 0.
t = 0
x(0) = 0,
C
(t, x)
(26) - 3 - 2 - 1 1 2 3 t - 10 - 5 5 10 f(t) -> x x
Rysunek 3: Graficzna reprezentacja zbioru rozwiązań równania ( 24 ) odpowiadających różnym wartościom parametru , na płaszczyźnie fazowej
Podsumowując to co powiedzieliśmy, wprowadzimy następujące oznaczenie: Punkt Punkt płaszczyzny fazowej nazywa się płaszczyzny fazowej nazywa się punktem osobliwym, jeżeli w tym punkcie prawa strona RRZ
punktem osobliwym, jeżeli w tym punkcie prawa strona RRZ
przybiera wartość zerową, lub jest nieoznaczona.
przybiera wartość zerową, lub jest nieoznaczona. Ogólna reguła więc brzmi następująco:
Postawienie warunków początkowych w punkcie osobliwym prowadzi do niejednoznaczności rozwiązania zagadnienia Postawienie warunków początkowych w punkcie osobliwym prowadzi do niejednoznaczności rozwiązania zagadnienia początkowego, lub do niedorzeczności.
początkowego, lub do niedorzeczności.
Liniowe równania różniczkowe rzędu pierwszego
Liniowe równania różniczkowe rzędu pierwszego
Liniowym niejednorodnym równaniem różniczkowym rzędu pierwszego nazywamy równanie postacigdzie - wiadome funkcje, przy czym zakładamy że nie równa się tożsamosciowo zeru. Stowarzyszonym równaniem jednorodnym nazywamy równanie postaci
Po przemnożeniu tego równania przez otrzymujemy równanie o zmiennych rozdzielonych:
Stąd, po stałkowaniu otrzymjemy
Rozwiązanie problemu niejednorodnego uzyskujemy metodą uzmienniania stałejmetodą uzmienniania stałej. Polega ona na zamianie stałej w powyższeym wzorze przez pewną nieznaną funkcję .
Rozwiązanie poszukujemy w postaci , . Po
podstawieniu do równania wyjściowego otrzymamy:
Zatem . Stąd już łatwo można otrzymać postać rozwiązania ogólnego problemu niejednorodnego:
C (t, x)
( , )
t
0x
0= f(t, x)
d x d t+ p(t) x(t) = q(t),
d x(t) d tp(t), q(t)
q(t)
+ p(t) (t) = 0.
dx∘ d tx
∘ dt x ∘= −p(t) dt.
dx∘ x ∘= C
,
C ∈ R.
x
∘e
− ∫ p(t) d tC
C(t)
x(t) = C(t) e
−F(t)F(t) = ∫ p(t) dt
= q(t)
lub dC = q(t)
dt.
dC dte
F(t)e
F(t)C(t) =
C
0+ ∫ q(t)
e
F(t)dt
x(t) =
e
−F(t)( + ∫ q(t)
C
0e
F(t)dt) , F(t) = ∫ p(t) dt.
(27) (28) (29) (30) (31) (32)
PRZYKŁAD
Przykład 6:
Przykład 6:
Z postaci równania odczytujemy że , natomiast . Do policzenia mamy całkę
oraz całkę
Rozwiązanie Rozwiązanie
Rozwiązanie ogólne równania ( 27 ) ma postać
Metoda Eulera
Metoda Eulera
Omówiliśmy , których rozwiązania można uzyskać za pomocą procesu całkowania. Niestety, nawet jeśli ograniczymy się do RRZ rzędu pierwszego, to większości z nich nie jesteśmy w stanie rozwiązać poprzez ich całkowanie, co więcej, rozwiązania takich równań nie są funkcjami elementarnymi. Dlatego powinniśmy w dalszym ciągu omówić bardziej uniwersalne metody.
Rozpatrzmy parę , gdzie jest zmienną niezależną, natomiast jest pewną różniczkowalną funkcją zmiennej Zadamy sobie pytanie, co oznacza równość
Odpowiedź, którą już znamy, brzmi następująco: prawa strona równania zadaje w każdym punkcie płaszczyzny fazowej wielkość pochodnej rozwiąznia przechodzącego przez ten punkt. Można to przeformułować jeszcze w taki sposób: prosta
jest styczna do rozwiązania równania ( 28 ) spełniającego warunek początkowy Rozwinięcie tego rozwiązania w szereg Taylora
pozwala wnioskować że "dokładne" rozwiązanie w małym otoczeniu punktu różni się od linii prostej ( 29 ), o wyraz który jest rzędu . A więc, dokładne rozwiązanie można przybliżać odcinkami prostej postaci
gdzie - zbiór punktów leżących w pobliżu poszukiwanej krzywej. W poszukiwaniu takiego przybliżenia korzystamy z pojęcia pola kierunków, które można określić jako pole taz zwanych infinitezymalnychinfinitezymalnych odcinków zadanych w każdym punkcie za pomocą wzoru
Obraz graficzny takiego pola kierunków można uzyskać w każdym z dostępnych pakietów matematyki komputerowej ( MathCad,MathCad, MathLab, Maple, Mathematica
MathLab, Maple, Mathematica ). Tutaj i dalej będziemy przytaczać "orfografię" pakietu MathematicaMathematica. Zobrazujemy, dla przykładu, pole kierunków funkcji
Komórka 1.1.
+ x(t) = t
d x d tp(t) = 1
q(t) = t
F(t) = ∫ p(t) dt ≡ ∫ dt = t.
∫
e
F(t)q(t) dt = ∫ t dt = (t − 1).
e
te
tx(t) =
e
−t( + (t − 1)).
C
0e
tx, y
x
y
x.
= f(x, y).
y
′( , )
x
0y
0y = ϕ(x; C)
y = (x − ) f( , ) +
x
0x
0y
0y
0y = ϕ(x; C)
y( ) = .
x
0y
0y(x) = + (x − ) f( , ) + O(|x −
y
0x
0x
0y
0x
0|
2)
x
0|x − x
0|
2= (x − ) f( , ) +
y
kx
kx
ky
ky
k( , ), k = 0, 1, . . . .
x
ky
k(x, y)
(dx, dy) = dx (1, f(x, y)) .
f(x, y) = x − y.
(33)
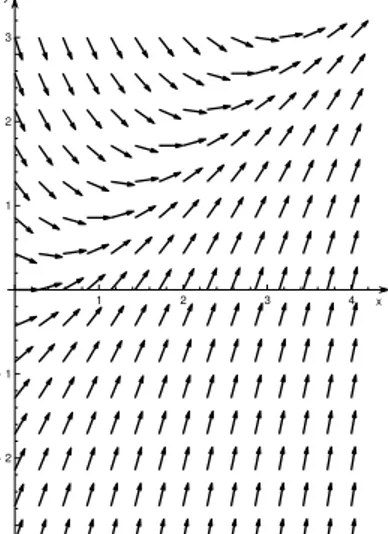
(34) Wynikiem jest wykres pola kierunków przedstawiony na Rys. 4
1 2 3 4 x - 3 - 2 - 1 1 2 3 y
Rysunek 4: Graficzna reprezentacja pola kierunków funkcji
Na Rys. 5 przedstawione zostało pole kierunków z kilkoma rozwiązaniami dokładnymi równania
które dane są wzorem
Widać na nim wyraźnie, że pole kierunków jest styczne do rozwiązania w każdym punkcie.
1 2 3 4 x - 3 - 2 - 1 1 2 3 y
Rysunek 5: Graficzna reprezentacja pola kierunków funkcji oraz rozwiązania dokładne (6) odpowiadające stałym całkowania , oraz
Znajomość pola kierunków w celu konstrukcji przybliżonego rozwiązania równania różniczkowego wykorzystał po raz pierwszy Leonard Euler. Jego algorytm dotyczy poszukiwania rozwiązania przybliżonego zadadnienia Cauchyego
Traktując stałe oraz funkcję jako znane wielkości, Euler zaproponował opis łamanej przybliżającej rozwiązanie na odcinku w postaci następującego algorytmu:
In[1] := [V ector FieldPlot ]
s
′f[ , ] = x − y;
x
−y
−V F1 = V ectorFieldPlot[{1, f[x, y]}, {x, 0, 4}, {y, −3, 3},
Axes → True, ScaleFunction → (1&), AxesLabel → {x, y}]
f(x, y) = x − y
= x − y,
y
′y =
C
0e
−x+ x − 1.
f(x, y) = x − y C0= 4C0= 1 C0= −4= f(x, y),
y( ) = .
y
′x
0y
0,
x
0y
0f(x, y)
[a = , b]
x
0= + h f( , ),
1 0 0 0(35)
gdzie .
Do tego, by przybliżenie dostatecznie dobrze opisywało poszukiwane rozwiązanie, należy stosować dostatecznie mały krok (czyli duże ). Do zastosowania powyższego algorytmu, w zasadzie, wystarczy umieć posługiwać się kalkulatorem, jednak odpowiednie obliczenia są bardzo żmudne. Podamy, zgodnie z 3,
dwie wersje algorytmu Eulera, zaimplentowane w pakiecie MathematicaMathematica dla rozwiązywania zagadnienia początkowego
na odcinku z krokiem . Prosty kod wygląda następująco: Komórka 1.2.
UWAGA
Uwaga 2:
Uwaga 2:
Warunki są potrzebne by uniknąć nieskończonej rekursji, która mogłaby powstać, jeżeli pozwolilibyśmy przybierać dowolne (w tym również ujemne) wartości.
Jeżeli teraz dodać moduł Komórka 1.3.
to otrzymamy poszukiwane przybliżone rozwiązanie w postaci tabelki.
Powyższy algorytm przy dużej liczbie iteracji będzie pracować wolno, ponieważ przy każdej kolejnej liczbie obliczenia rozpoczynają się od punktu . Algorytm można jednak zmodyfikować w taki sposób że wielkości będą zapamiętywane, co znacznie usprawni obliczenia. Kolejną rzeczą jest zastąpienie tabelki przez funkcję interpolacyjną
. Wszystko to razem wzięte tworzy następujący szybko działający algorytm: Komórka 1.4.
= + h f( , ),
y
1y
0x
0y
0= + h f( , ),
y
2y
1x
1y
1= + h f( , ),
y
3y
2x
2y
2. . . .
= + h f( , ),
y
k+1y
kx
ky
k. . . .
=
+ h f(
,
),
y
Ny
N−1x
N−1y
N−1h =
b−a Nh
N
= x − y, y( ) = 0.
y
′x
0(0, 4)
h = 0.2
x[ ] := nh;
n
−y[ ] := y[n − 1] + hf[x[n − 1], y[n − 1]]/; n > 0&&n ∈ Integers;
n
−h = 0.2;
y0 = 0;
f[ , ] = x − y;
x
−y
−n > 0 n ∈ Integers
n
sol = Table[{x[n], y[n]}, {n, 0, 4/h}],
N
n
y[0]
v[0], v[1], . . . v[n]
sol
vEul[ ] = Interpolation[sol][t]
t
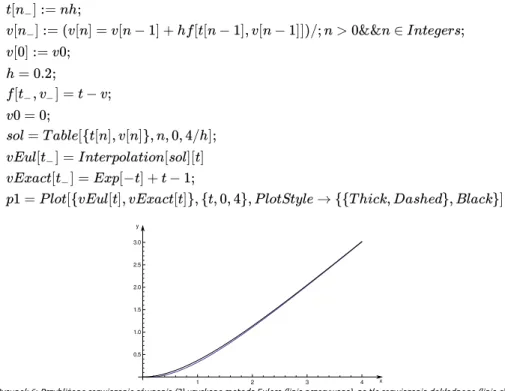
−(36) 1 2 3 4 0.5 1.0 1.5 2.0 2.5 3.0 y x
Rysunek 6: Przybliżone rozwiązanie równania (2) uzyskane metodą Eulera (linia przerywana), na tle rozwiązania dokładnego (linia ciągła)
W wyniku implementacji tego algorytmu uzyskujemy rozwiązanie przybliżone na tle rozwiązania dokładnego, co ilustruje Rys. 6.
Przypisy
Przypisy
1. Teza ta jest poprawna tylko wówczas gdy po różne strony równości stoją funkcje tylko jednego argumentu, innymi słowami, zmienne się nie mieszają
2. Rozwiązanie ( 19 ) mówi nam, iż populacja bakterii rośnie z czasem w sposób wykładniczy. Prowadzi to do
wiadomego paradoksu: w skończonym czasie niewielka populacja bakterii rozrasta się do tego stopnia, iż pokrywa metrową warstwą kulę ziemską. Jest to związane
z założeniem o nieograniczonej bazie pokarmowej oraz braku czynników powodujących kurczenie się populacji. Oba te założenia nie są prawdziwe, niemniej jednak
równanie ( 17 ) jest użyteczne, gdyż opisuje poprawnie początkowe stadium rozwoju populacji, w którym 'walka' o pokarm oraz inne
czynniki powodujące spowolnienie wzrostu nie są jeszcze istotne. Bardziej realistycznym modelem uwzględniającym powyższe czynniki naturalnego spowolnienia
jest równanie postaci
zwane równaniem logistycznym.równaniem logistycznym.
3. D. Dubin, Numerical and Analytical Methods for Scientists and Enginneers Using Mathematica, John Wiley and Sons, New Jersey, 2003
Równania różniczkowe liniowe wyższych rzędów
Równania różniczkowe liniowe wyższych rzędów
-podstawowe pojęcia
podstawowe pojęcia
t[ ] := nh;
n
−v[ ] := (v[n] = v[n − 1] + hf[t[n − 1], v[n − 1]])/; n > 0&&n ∈ Integers;
n
−v[0] := v0;
h = 0.2;
f[ , ] = t − v;
t
−v
−v0 = 0;
sol = Table[{t[n], v[n]}, n, 0, 4/h];
vEul[ ] = Interpolation[sol][t]
t
−vExact[ ] = Exp[−t] + t − 1;
t
−p1 = Plot[{vEul[t], vExact[t]}, {t, 0, 4}, PlotStyle → {{Thick, Dashed}, Black}]
= k P(t) (1 −
) = 0,
dP(t)
(37)
(38)
DEFINICJA
Definicja 2: Równania liniowego rzędu n-tego
Definicja 2: Równania liniowego rzędu n-tego
Równaniem różniczkowym liniowym rzędu nazywamy równanie postaci
gdzie jest szukaną funkcją a dane funkcje i są ciągłe i określone w
przedziale o wartościach rzeczywistych. Przez przedział rozumiemy jeden z następujących zbiorów: lub .
UWAGA
Uwaga 3:
Uwaga 3:
Jeżeli dla każdego to równanie ( 37 ) będziemy nazywać równaniem jednorodnymrównaniem jednorodnym, w przeciwnym razie równaniem niejednorodnym równaniem niejednorodnym.
DEFINICJA
Definicja 3: Rozwiązania
Definicja 3: Rozwiązania
RozwiązaniemRozwiązaniem równania ( 37 ) nazywamy funkcję określoną w przedziale i -krotnie różniczkowalną, spełniającą dla każdego równanie ( 37 ).
DEFINICJA
Definicja 4: Problemu początkowego
Definicja 4: Problemu początkowego
Zagadnienie polegające na znalezieniu rozwiązania równania ( 37 ), które dla ustalonego spełnia -równości:
gdzie są danymi stałymi, będziemy nazywać problemem początkowymproblemem początkowym.
n
(t)
(t) +
(t)
(t) + ⋯ + (t) (t) + (t)y(t) = f(t)
a
ny
(n)a
n−1y
(n−1)a
1y
′a
0y(t)
y : I → R,
f(t)
a
i(t), i = 0, …, n
I ⊂ R
I
(a, b), (−∞, a), (a, +∞)
R
f(t) = 0
t ∈ I,
y(t)
I n
t ∈ I
∈ I
t
0n
y( ) = ,
t
0b
0y
′( ) = , …,
t
0b
1y
n−1( ) =
t
0b
n−1,
, …,
b
0b
n−1PRZYKŁAD
Przykład 7:
Przykład 7:
Pokażemy, że funkcja jest rozwiązaniem problemu początkowego postaci
Rozwiązanie: i więc czyli
funkcja jest rozwiązaniem równania.
Ponadto i , zatem funkcja spełnia waruneki początkowe.
PRZYKŁAD
Przykład 8:
Przykład 8:
Pokażemy, że funkcja jest rozwiązaniem następującego problemu początkowego
w przedziale dla dowolnego parametru .
Rozwiązanie: i zatem
Ponadto i , co kończy dowód, że jest rozwiązaniem problemu początkowego.
y(t) = sin(2t)
(t) + 4y(t) = 0, y(0) = 0, (0) = 2, gdzie t ∈ R.
y
′′y
′(t) = 2 cos(2t)
y
′y
′′(t) = −4 sin(2t),
y
′′(t) + 4y(t) = −4 sin(2t) + 4 sin(2t) = 0,
y(t)
y(0) = sin(0) = 0
y
′(0) = 2 cos(0) = 2
y(t)
y(t) = c + t + 1
t
2(t) − 2t (t) + 2y(t) = 2, y(0) = 1,
(0) = 1
t
2y
′′y
′y
′(−∞, ∞),
c
(t) = 2ct + 1
y
′y
′′(t) = 2c
(t) − 2t (t) + 2y(t) = 2c − 2t(2ct + 1) + 2(c + t + 1) = 2.
t
2y
′′y
′t
2t
2y(0) = 1
y
′(0) = 1
y(t)
(39) (40)
TWIERDZENIE
Twierdzenie 2:
Twierdzenie 2:
ZAŁOŻENIA: ZAŁOŻENIA:Niech funkcje będą rozwiązanimi równania jednorodnego
TEZA: TEZA:
Wtedy dowolna liniowa kombinacja tych funkcji gdzie
są dowolnymi stałymi, jest również rozwiązaniem równania ( 39 )
DOWÓD: DOWÓD:
Dowód przeprowadzimy w przypadku, gdy , (dla dowolnego dowód jest analogiczny). Niech będą rozwiązaniami równania
Definiujemy gdzie są to dowolne stałe, wtedy
Podstawiając teraz do równania ( 40 ) otrzymujemy
Zatem jest rozwiązaniem równania ( 40 ).
PRZYKŁAD
Przykład 9:
Przykład 9:
Funkcje i są rozwiązaniami równania
Zatem na mocy twierdzenia 2, funkcja gdzie - są to dowolne stałe, jest też rozwiązaniem tego równania.
(t), …, (t)
y
1y
k(t)
(t) +
(t)
(t) + ⋯ + (t) (t) + (t)y(t) = 0.
a
ny
(n)a
n−1y
(n−1)a
1y
′a
0y(t) =
c
1y
1(t) + ⋯ +
c
ky
k(t),
, …
c
1c
kk = n = 2
k, n ∈ N
(t), (t)
y
1y
2(t) (t) + (t) (t) + (t)y(t) = 0.
a
2y
′′a
1y
′a
0y(t) =
c
1y
1(t) +
c
2y
2(t)
c
1,
c
2(t) =
(t) +
(t) i
(t) =
(t) +
(t).
y
′c
1y
′ 1c
2y
2′y
′′c
1y
1′′c
2y
2′′y(t), (t),
y
′y
′′(t)
(t) (
(t) +
(t)) + (t) (
(t) +
(t)) + (t) (
(t) +
(t)]) =
a
2c
1y
′′1c
2y
2′′a
1c
1y
1′c
2y
2′a
0c
1y
1c
2y
2( (t) (t) + (t) (t) + (t) (t)) + ( (t) (t) + (t) (t) + (t) (t)]) = 0.
c
1a
2y
′′1a
1y
1′a
0y
1c
2a
2y
2′′a
1y
2′a
0y
2y(t)
(t) =
y
1e
−ty
2(t) =
e
−3ty
′′+ 3 + 2y = 0.
y
′y(t) =
c
1e
−t+
c
2e
−3t,
c
1,
c
2TWIERDZENIE
Twierdzenie 3:
Twierdzenie 3: O istnieniu i jednoznaczności rozwiązania problemu Cauchy'ego
O istnieniu i jednoznaczności rozwiązania problemu Cauchy'ego
ZAŁOŻENIA: ZAŁOŻENIA:
Niech funkcje i będą ciągłe i określone w przedziale ponadto dla
każdego
TEZA: TEZA:
Wtedy problem początkowy
gdzie , zaś - są to dowolne stałe, posiada dokładnie jedno rozwiązanie określone w przedziale .
Dowód tego twierdzenia jest przedstawiony w module Twierdzenia o istnieniu i jednoznaczności dla równań różniczkowych zwyczajnych.
Liniowa zależność i niezależność funkcji
Liniowa zależność i niezależność funkcji
DEFINICJA
Definicja 5: Liniowej zależności zbioru funkcji
Definicja 5: Liniowej zależności zbioru funkcji
Mówimy, że zbiór funkcji zbiór funkcji określonych na przedziale jest liniowo zależnyliniowo zależny, jeżeli istnieją stałe
nie wszystkie równe zero, takie że dla każdego .
DEFINICJA
Definicja 6: Liniowej niezależności zbioru funkcji
Definicja 6: Liniowej niezależności zbioru funkcji
Mówimy, że zbiór funkcjizbiór funkcji określonych na przedziale jest liniowo niezależny liniowo niezależny jeśli nie jest liniowo zależny. Inaczej mówiąc, równość zachodzi dla każdego jedynie w przypadku, gdy wszystkie współczynniki są równe zero.
f(t)
a
k(t), gdzie k = 0, …, n,
I ⊂ R ,
a
n(t) ≠ 0,
t ∈ I.
{ (t)
a
ny
(n)(t) +
a
n−1(t)
y
(n−1)(t) + ⋯ + (t) (t) + (t)y(t) = f(t),
a
1y
′a
0y( ) = , ( ) = , …,
t
0b
0y
′t
0b
1y
(n−1)( ) =
t
0b
n−1t ∈ I,
∈ I
t
0b
0, . . . ,
b
n−1I
(t), …, (t)
f
1f
nI ⊂ R
, …,
c
1c
nc
1f
1(t) + ⋯ +
c
nf
n(t) = 0 ,
t ∈ I
(t), …, (t)
f
1f
nI
(t) + ⋯ +
(t) = 0
c
1f
1c
nf
nt ∈ I
, i = 1, …, n
c
i(41)
UWAGA
Uwaga 4:
Uwaga 4:
Z liniowej zależności funkcji wynika, że jedną z nich można przedstawić jako kombinację pozostałych. Na przykład: jeśli to
Stąd wynika, że dwie funkcje i są liniowo zależne wtedy i tylko wtedy, gdy istnieje stała taka, że .
PRZYKŁAD
Przykład 10:
Przykład 10:
Funkcje określone na są liniowo zależne.
Istotnie jeśli weżmiemy to otrzymamy tożsamość
co oznacza, że funkcje są liniowo zależne.
PRZYKŁAD
Przykład 11:
Przykład 11:
Pokażemy, że funkcje są liniowo niezależne.
Należy zatem pokazać, że następująca tożsamość
zachodzi jedynie w przypadku gdy .
Z równości Liniowa zależnośc i niezależność funkcji-( 1 ) dla wynika, że . Uwzględniając, że i podstawiając do równości Liniowa zależnośc i niezależność funkcji-( 1 ) za kolejno i otrzymujemy następujący układ równań
którego jedynym rozwiązaniem jest i co kończy dowód liniowej niezależności.
(t), …, (t)
f
1f
n≠ 0,
c
1(t) = −
(t) −
(t) − ⋯ −
(t).
f
1 c2c1f
2 c3c1f
3 cnc1f
nf(t) g(t)
c
f(t) = cg(t)
(t) = t, (t) = , (t) = 4t − 3
f
1f
2t
2f
3t
2R
= −4,
= 3,
= 1,
c
1c
2c
3−4 (t) + 3 (t) + (t) = −4t + 3 + 4t − 3 = 0
f
1f
2f
3t
2t
2(t), (t), (t)
f
1f
2f
3(t) = 1, (t) = t, (t) =
f
1f
2f
3t
2(t) +
(t) +
(t) = 0 dla t ∈ R
c
1f
1c
2f
2c
3f
3= = = 0
c
1c
2c
3t = 0,
c
1= 0
c
1= 0
t
−1 1,
{ − + = 0
c
2c
3+ = 0,
c
2c
3= 0
c
2c
3= 0,
(42) (43) (44)
TWIERDZENIE
Twierdzenie 4:
Twierdzenie 4:
ZAŁOŻENIA: ZAŁOŻENIA:Zakładamy, że funkcje określone na przedziale są krotnie różniczkowalne i wyznacznik
nie jest równy zero przynajmniej dla jednego z przedziału .
TEZA: TEZA:
Wtedy funkcje są liniowo niezależne. Powyższy wyznacznik będziemy oznaczać i
nazywać WrońskianemWrońskianem, inaczej wyznacznikiem macierzy Wrońskiegowyznacznikiem macierzy Wrońskiego.
DOWÓD: DOWÓD:
Dowód twierdzenia podamy w przypadku, gdy Dla większych dowód jest podobny. Zakładamy, że istnieje dla którego
Dla dowodu nie wprost zakładamy, że funkcje i są liniowo zależne. To oznacza, że istnieją stałe jednocześnie nie równe zero takie, że dla każdego zachodzi równość
Różniczkując stronami równość Liniowa zależnośc i niezależność funkcji-( 3 ) dostajemy
Dla z równości Liniowa zależnośc i niezależność funkcji-( 3 ) i Liniowa zależnośc i niezależność funkcji-( 4 ) otrzymujemy układ równań
o niewiadomych i dla którego wyznacznik
Zatem układ ten posiada jedynie rozwiązanie zerowe i co jest sprzeczne z założeniem, że i nie są jednocześnie równe zero.
Oznacza to, że funkcje i są liniowo niezależne.
WNIOSEK
Wniosek 1:
Wniosek 1:
Jeżeli funkcje są - krotnie różniczkowalne na i są liniowo zależne, to dla każdego
(t), …, (t)
f
1f
nI ⊂ R
n − 1
∣
∣
∣
∣
∣
∣
∣
(t)
f
1(t)
f
′ 1⋮
(t)
f
1(n−1)(t)
f
2(t)
f
′ 2⋮
(t)
f
2(n−1)…
…
⋱
…
(t)
f
n(t)
f
n′⋮
(t)
f
n(n−1)∣
∣
∣
∣
∣
∣
∣
t
I
(t), …, (t)
f
1f
nW( (t), …, (t))
f
1f
nn = 2.
n
∈ I,
t
0W( ( ), ( )) ≠ 0.
f
1t
0f
2t
0(t)
f
1f
2(t)
c
1,
c
2t ∈ I
(t) +
(t) = 0.
c
1f
1c
2f
2(t) +
(t) = 0.
c
1f
1′c
2f
2′t = ,
t
0{
c
1f
1( ) +
t
0c
2f
2( ) = 0
t
0( ) +
( ) = 0
c
1f
1′t
0c
2f
2′t
0c
1c
2,
W( ( ), ( )) ≠ 0.
f
1t
0f
2t
0= 0
c
1c
2= 0,
c
1c
2(t)
f
1f
2(t)
(t), …, (t)
f
1f
nn − 1
I
W( (t), …, (t)) = 0,
f
1f
nt ∈ I.
UWAGA
Uwaga 5:
Uwaga 5:
Z tego, że wrońskian dla funkcji jest równy zero dla każdego nie wynika, że funkcje są liniowo zależne. Na przykład: funkcje są różniczkowalne w i
dla każdego . Funkcje te są liniowo niezależne, ponieważ nie istnieje takie, że dla każdego .
PRZYKŁAD
Przykład 12:
Przykład 12:
Pokażemy, że funkcje i są liniowo niezależne. W tym celu obliczamy ich wrońskian
Stąd, na mocy twierdzenia Liniowa zależnośc i niezależność funkcji-1, funkcje i są liniowo niezależne.
PRZYKŁAD
Przykład 13:
Przykład 13:
Pokażemy, że funkcje są liniowo zależne.
Ponieważ zatem
dla każdego .
Ponieważ współczynniki przy nie są równe zero, więc funkcje są liniowo
zależne.
(t), …, (t)
f
1f
nt ∈ I
(t), …, (t)
f
1f
nf
1(t) = , (t) = t|t|
t
2f
2R
W( (t), (t)) = 0,
f
1f
2t ∈ R
c ∈ R
(t) = c (t),
f
1f
2t ∈ R
(t) = , (t) = t
f
1e
2tf
2e
2tf
3(t) =
e
tW( (t), (t), (t)) =
f
1f
2f
3=
=
∣
∣
∣
∣
∣
e
2t2e
2t4e
2tte
2t(2t + 1)e
2t(4t + 4)e
2te
te
te
t∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
e
2te
2t3e
2tte
2t(t + 1)e
2t(3t + 4)e
2te
t0
0
∣
∣
∣
∣
∣
⋅
= [ (3t + 4) − (3t + 3) ] =
≠ 0.
e
t∣
∣
∣
3e
e
2t2t(3t + 4)e
(t + 1)e
2t2t∣
∣
∣ e
te
4te
4te
5t(t) = , (t) = t
f
1e
2tf
2e
2tf
3(t) =
e
t(t) = sin t, (t) = cos t, (t) = sin(t + )
f
1f
2f
3 π6(t) = sin(t + ) = sin tcos + cos tsin =
sin t + cos t =
(t) +
(t),
f
3 π6 π6 π6 √23 12 √23f
1 12f
2(t) +
(t) − (t) = 0
3 √ 2f
1 12f
2f
3t ∈ R
(t), (t), (t)
f
1f
2f
3f
1(t), (t), (t)
f
2f
3PRZYKŁAD
Przykład 14:
Przykład 14:
Pokażemy, że dla dowolnego funkcje są liniowo niezależne. I-sposób:
I-sposób:
Należy pokazać prawdziwość następującej implikacji:
Wynika ona bezpośrednio z faktu, że wielomian niezerowy o współczynnikach rzeczywistych stopnia ma co najwyżej różnych pierwiastków rzeczywistych. Ponieważ wielomian ma nieskończenie wiele pierwiastków więc musi być wielomianem zerowym, czyli wszystkie jego wspóczynniki są równe zero.
II-sposób: II-sposób:
Ponieważ wrońskian funkcji :
jest różny od zera, więc liniowa niezależność funkcji wynika z twierdzenia Liniowa zależnośc i niezależność funkcji-1.
WNIOSEK
Wniosek 2:
Wniosek 2:
Z przykładu Liniowa zależnośc i niezależność funkcji-5 wynika, że funkcje są liniowo niezależne.
n
1, t, , …,
t
2t
n1 + t + ⋯ +
= 0, t ∈ R ⟹
= = ⋯ =
= 0.
c
0c
1c
nt
nc
0c
1c
nn
n
1 + t + ⋯ +
c
0c
1c
nt
n1, t, , …,
t
2t
nW(1, t, … ) =
t
n= 1!2!3! …n!
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1
0
0
0
⋮
0
t
1!
0
0
⋮
0
t
22t
2!
0
⋮
0
t
33t
23!t
3!
⋮
0
…
…
…
…
⋱
…
t
nnt
n−1n(n − 1)t
n−2n(n − 1)(n − 2)t
n−3⋮
n!
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
, t ,
, …,
e
λe
λt
2e
λt
ne
λ(45)
PRZYKŁAD
Przykład 15:
Przykład 15:
Funkcje są liniowo niezależne.Jeżeli weźmiemy liniową kombinację tych funkcji i przyrównamy ją do zera
a w miejsce podstawimy wówczas i Zatem
równość ta zachodzi, gdy ponieważ niezerowy wielomian może mieć
co najwyżej różnych pierwiatków rzeczywistych.
Analogicznie, jeżeli w tożsamości Liniowa zależnośc i niezależność funkcji-( 5 ) w miejsce podstawimy
dla których i to otrzymujemy równość
a ta zachodzi, gdy i to kończy dowód liniowej niezależności danego zbioru funkcji.
WNIOSEK
Wniosek 3:
Wniosek 3:
Z przykładu Liniowa zależnośc i niezależność funkcji-6 wynika, że funkcje
są liniowo niezależne.
PRZYKŁAD
Przykład 16:
Przykład 16:
Funkcje są liniowo niezależne, jeżeli gdy
W celu pokazania liniowej niezależności powyższych funkcji, liczymy ich wrońskian