UKŁADY KOMBINACYJNE - ZADANIA PROJEKTOWE Zadanie 1
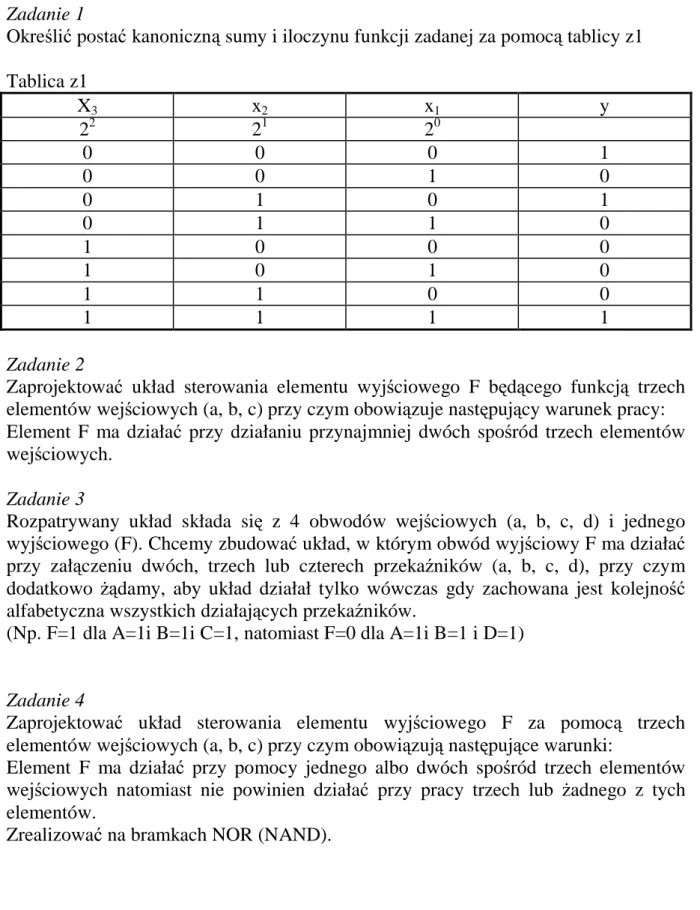
Określić postać kanoniczną sumy i iloczynu funkcji zadanej za pomocą tablicy z1 Tablica z1 X3 x2 x1 y 22 21 20 0 0 0 1 0 0 1 0 0 1 0 1 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 Zadanie 2
Zaprojektować układ sterowania elementu wyjściowego F będącego funkcją trzech elementów wejściowych (a, b, c) przy czym obowiązuje następujący warunek pracy: Element F ma działać przy działaniu przynajmniej dwóch spośród trzech elementów wejściowych.
Zadanie 3
Rozpatrywany układ składa się z 4 obwodów wejściowych (a, b, c, d) i jednego wyjściowego (F). Chcemy zbudować układ, w którym obwód wyjściowy F ma działać przy załączeniu dwóch, trzech lub czterech przekaźników (a, b, c, d), przy czym dodatkowo żądamy, aby układ działał tylko wówczas gdy zachowana jest kolejność alfabetyczna wszystkich działających przekaźników.
(Np. F=1 dla A=1i B=1i C=1, natomiast F=0 dla A=1i B=1 i D=1)
Zadanie 4
Zaprojektować układ sterowania elementu wyjściowego F za pomocą trzech elementów wejściowych (a, b, c) przy czym obowiązują następujące warunki:
Element F ma działać przy pomocy jednego albo dwóch spośród trzech elementów wejściowych natomiast nie powinien działać przy pracy trzech lub żadnego z tych elementów.
Zadanie 5
Stopień zagrożenia przodka wyrobiska określają wskazania pięciu dwustanowych czujników naprężenia: (a, b, c, d, e). Każdy z nich generuje „1”, gdy naprężenie przekroczy wartość dopuszczalną. Ze względu na usytuowanie oraz indywidualnie dobraną wartość krytyczną naprężenia, przypisujemy każdemu czujnikowi następującą ilość „stopni zagrożenia”:
a-3, b-3, c-2, d-1, e-1.
Gdy suma stopni jest większa od 4, uważamy sytuację za niebezpieczną generowany jest sygnał F1, a gdy suma stopni przekroczy 7, generowany jest sygnał alarmu F2.
Zbudować na bramkach NAND (NOR) układ realizujący funkcje F1 i F2.
Zadanie 6
Przeprowadzić syntezę układu automatycznego sterowania położenia zasuwy kanału wentylacyjnego , wentylatora napędzanego silnikiem elektrycznym. Silnik wentylatora włączony jest do sieci przy pomocy wyłącznika wysokiego napięcia Wl (kierunku
lewego) i Wp( kierunku prawego). Zasuwa powinna być otwarta w czasie pracy
wentylatora (jeden z wyłączników załączony) a zamknięta w czasie postoju (Wl i Wp
wyłączone). Wyłączniki Wl i Wp posiadają blokadę mechaniczną uniemożliwiającą
równoczesne ich załączanie. Podnoszenie i opuszczanie zasuwy odbywa się przy użyciu wyłącznika elektrycznego sterowanego dwoma stycznikami Sp (podnoszenie) i So (opuszczanie). Zatrzymanie wciągnika powinno nastąpić po zadziałaniu odpowiednich czujników zasuwy A (przy podnoszeniu) i B (przy opuszczaniu).
Zadanie 7
W chodniku kopalni zainstalowano eksperymentalną instalację przeciwpożarową składającą się z czterech czujników temperatury (abcd). Każdy z tych czujników jest czujnikiem dwustanowym, dającym sygnały:
0 - gdy temperatura jest niższa od krytycznej, 1 - gdy temperatura przekroczy wartość krytyczną. Zdecydowano się na następujące rozwiązanie:
- gdy najwyżej dwa czujniki wskazują „1” układ powinien generować sygnał F1
wskazujący możliwość wystąpienia pożaru,
- gdy więcej niż dwa czujniki wskazują „1” układ powinien generować sygnał alarmu przeciwpożarowego F2.
Zadanie 8
W osadzarce ODM-18 zainstalowano eksperymentalny układ sterowania cyklem pulsacji. W układzie uproszczonej identyfikacji nadawy na osadzarkę następuje rozróżnienie rodzaju nadawy. Informacja o tym zakodowana jest na trzech liniach abc wg schematu:
I rodzaj - abc =000 II rodzaj - abc =001 III rodzaj - abc =011 IV rodzaj - abc =010 V rodzaj - abc =110
Ponadto z wagi taśmowej zamontowanej na przenośniku podawany jest sygnał r o obciążeniu nadawą osadzarki:
r=0 małe obciążenie r=1 duże obciążenie
Przyjęto następujący algorytm sterowania: - przy małym obciążeniu
I i II rodzaj nadawy-Y1Y2 =00
III rodzaj nadawy -Y1Y2 =01
IV i V rodzaj nadawy -Y1Y2 =11
- przy dużym obciążeniu I i II rodzaj nadawy-Y1Y2 =01
III rodzaj nadawy -Y1Y2 =01
IV rodzaj nadawy -Y1Y2 =11
V rodzaj nadawy-Y1Y2 =00
Zadanie 9
Zrealizować kombinacyjny układ sterowania trzema zwrotnicami.
Sygnał sterujący zwrotnic yi (i=1,2,3) przyjmuje wartość 0 jeżeli położenie zwrotnicy
jest takie jak na rys. z9. Zmiana położenia powoduje Yi=1.
Wejściem systemu sterowania są przyciski a1, a2. Potrzeba otwarcia toru 0-1
sygnalizowana jest wyłączeniem obu przycisków, toru 0-2 włączeniem tylko przycisku a1, toru 0-3 tylko przycisku a2, toru 0-4 obu przycisków a1a2.
0 4 3 2 1 Y1 Y2 Y3
Zadanie 10
Na punkcie załadowczym kopalni odkrywkowej załadowywanie wagonów następuje za pomocą przenośnika taśmowego T. Przesuwanie pociągu w celu załadowania kolejnych wagonów odbywa się za pomocą kołowrotu elektrycznego K. Napełnienie wagonu kontrolowane jest czujnikiem fotoelektrycznym F, natomiast prawidłowe ustawienie wagonu kontrolowane jest za pomocą trzech czujników magnetycznych A, B, C. Rozmieszczenie czujników pokazano na rys. z10, przy czym spełniony musi być warunek r < a << L. (gdzie: a- długość między czujnikami, r- odległość między wagonami, L- długość wagonu).
L T K A B C r a F
Rys. z10 Uproszczony schemat technologiczny układu z zadania 10
Zaprojektować układ automatycznego sterowania napędów kołowrotu K i taśmy T, tak aby po prawidłowym ustawieniu wagonu, które zasygnalizowane jest przez czujniki A,B,C nastąpiło wyłączenie napędu kołowrotu. Ponowne załączenie napędu kołowrotu powinno nastąpić dopiero w momencie zadziałania czujnika fotoelektrycznego F, to jest po napełnieniu wagonu. W momencie gdy zapełniony zostanie ostatni wagon, powinno nastąpić zatrzymanie napędów taśmy oraz kołowrotu.
Zadanie 11
Zrealizować sumator dwu liczb n-bitowych (rys. z11) korzystając z kombinacyjnego układu iteracyjnego z jednokierunkowym przepływem informacji.
xa xb u0 un y n n n
Rys. z11a Schemat blokowy sumatora n-bitowego gdzie: xa, xb – liczby n-bitowe,
u – przeniesienie,
Zadanie 12
Węgiel określonej klasy podawany jest przenośnikiem na zsuwnie, gdzie może być kierowany do dwóch zbiorników (zI lub zII). Do zbiornika zII gdy klapa K jest w położeniu L (K=0), do zbiornika zI gdy klapa jest w położeniu P (K=1). Obecność węgla stwierdza czujnik x. Węgiel można transportować jeżeli zbiorniki nie są zapełnione. Zapełnienie zbiorników jest kontrolowane za pomocą czujników h1 i h2. Przenośnik załączany jest za pomocą stycznika Y
(Y=1 załączony). Z układu klasyfikacji węgla Przenośnik (Y) x L P (K) zII zI załadunek h1 h2
Rys. z12 Uproszczony schemat technologiczny układu z zadania 12
Zaprojektować układ sterowania dwustanowego Y=f(h1, h2, x) oraz K=f(h1, h2, x) na
elementach stykowych.
Zadanie 13
Zaprojektować układ przełączający umożliwiający sterowanie pracą 3 dmuchaw sprężonego powietrza w zależności od sygnałów wejściowych a1a2 oraz b1b2. Silniki dmuchaw są
załączone za pomocą styczników Y1, Y2, Y3.
Program pracy dmuchaw jest następujący: Dla sygnałów a1a2:
00 – wszystkie dmuchawy wyłączone 01 – jedna włączona
10 – dwie włączone
Zadanie 14
Zrealizować układ komparatora dwóch liczb n-bitowych. Zagadnienie zrealizować za pomocą metody iteracyjnej.
Zadanie 15
Końcówka chwytna chwytaka robota jest wyposażona w szesnaście czujników dotykowych. Czujniki ułożone są w matrycy 4x4.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 a=1 b c d=1 =1 =1
Rys. z15 kodowanie czujników wejścia (a,b,c,d)
Robot powinien chwytać czop zaworu kulowego. Uchwycenie czopu kulowego sygnalizuje jeden z szesnastu czujników – w idealnym przypadku powinien to być jeden z czterech środkowych czujników (6,7,10,11). Uchwycenie nieprawidłowe, sygnalizowane przez czujniki krańcowe powinno być powtórzone. W tym przypadku czynności ponownej próby uchwycenia powinny być uaktywnione przez sygnał W=1, przy czym robot powinien odpowiednio korygować położenie chwytaka, tzn. chwytak o jedno pole na lewo L=1, na prawo P=1, w górę G=1, w dół D=1. Szesnaście czujników zostało zakodowanych jak na rys. Wyznaczyć wyjścia W, P, L, G, D, w funkcji abcd. za pomocą bramek.
Zadanie 16
Zaprojektować układ sterowania załączania oświetlenia z 3 różnych punktów przyciskami A,B,C tak aby włączanie lub wyłączanie oświetlenia (F) mogło nastąpić z dowolnego punktu.
Zadanie 17
Zaprojektować układ kombinacyjny o czterech wejściach abcd (przedstawionych dwójkowo) i czterech wyjściach (y1-y4) których suma każdego wyjścia liczona w sposób dziesiętny jest równa 30.
Zadanie 18
Zaprojektować układ nadzorujący napełnianie zbiornika z cieczą (basenu kąpielowego). Dopływ wody sterowany jest zaworem X (0,1). Odpływ wody sterowany zaworem Y (0,1). W zbiorniku znajdują się 3 czujniki A, B, C wyznaczające odpowiednio: maksymalny, średni, minimalny poziom cieczy. Zadziałanie czujnika następuje po zanurzeniu go w cieczy. (Prędkości odpływu i dopływu cieczy w zależności od jej ciśnienia mogą być różne). Lustro cieczy nie powinno obniżać się poniżej poziomu minimalnego. Dodatkowo jest włączony sygnał Z alarmu przy uszkodzeniu czujników ABC. Jednocześnie z sygnałem alarmu następuje zamknięcie zaworu dopływu i otwarcie zaworu odpływu wody. Między stanami cieczy średnim i maksymalnym powinny być otwarte oba zawory w celu ciągłej jej wymiany w zbiorniku.
Zadanie 19
Zrealizować układ sumatora 2 liczb 1-bitowych.
Zadanie 20
Zrealizować układ sumatora 2 liczb 2-bitowych korzystając z metody iteracyjnej.
Zadanie 21
Przedstawić realizację komparatora dwóch liczb 1-bitowych
Zadanie z22
Przedstawić realizację komparatora dwóch liczb 2-bitowych korzystając z metody iteracyjnej.
Zadanie 23
Zrealizować układ zamiany kodu „1 z 4” w naturalny kod dwójkowy.
Zadanie 24
Zrealizować układ zamiany 2-bitowego kodu naturalnego „21” na kod „1 z 4”.
Zadanie 25
Zaprojektować układ realizujący następujące operacje arytmetyczne: Wejścia programujące F
x1 x2 x3, x4
Zadanie 26
Zrealizować konwerter naturalnego kodu binarnego (kodu 8421) na kod Graya. Tablica z26 7Tablica zależności kodów 8421 i kodu Graya.
Kod 8421 Kod Graya
abcd WXYZ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 0000 0001 0011 0010 0110 0111 0101 0100 1100 1101 1111 1110 1010 1011 1001 1000
Zadanie 27
Zrealizować konwerter naturalnego kodu binarnego (kodu 8421) na kod szesnastkowy (hexadecimal). a b c d e f g
Rys. z27 Wyświetlanie znaków za pomocą wyświetlacza siedmiosegmentowego Tablica z27 Tablica zależności kodów 8421 i kodu szesnastkowego.
Kod 8421 Kod szesnastkowy segmenty abcdefg 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 0 1 2 3 4 5 6 7 8 9 A B C D E F 1111110 0110000 1101101 1111001 0110011 1011011 1011111 1110000 1111111 1111011 1110111 0011111 1001110 0111101 1001111 1000111 Zadanie 28
Trzy zbiorniki wyrównawcze A1A2A3 są zawsze zapełniane w kolejności A1 ->A2 ->A3, a
Zadanie 30
Informacja z czujnika metanu jest przekazywana do centrali metanometrycznej w sposób cyfrowy z wykorzystaniem pięciu linii: abcde.
- najniższych 11 stanów (0-10) oznacza małe stężenie metanu, - najwyższych 11 stanów (21-31) oznacza duże stężenie metanu.
Jeżeli natomiast pojawi się któryś ze stanów niedozwolonych (11-20) niebezpieczne stężenie metanu należy generować sygnał alarmu Y. Zrealizować układ generujący sygnał alarmu na multiplekserze o 4wejściach adresowych.
Zadanie 31
Dla funkcji przedstawionych w postaci zapisu dziesiętnego:
∑
= abcd(0,3,6,11,13) W∑
= abcd(1,2,4,6,7,9,10,11,12,13,14) ZOkreślić realizację z zastosowaniem: - demultipleksera 16 wyjściowego, - multipleksera 8 wejściowego, - demultipleksera 8 wejściowego, - multipleksera 4 wejściowego.
Zadanie 32
Multiplekserem o 3wejściach adresowych zrealizować układ rozpoznający te miesiące w roku które mają 31 dni.
Zaprojektować układ umożliwiający podnoszenie liczby 0-3 (w systemie dwójkowym) do sześcianu (też w systemie dwójkowym). Rozwiązanie na demultiplekserze 4wyjściowym.
Zadanie 33
Zrealizować na multiplekserze o 2 wejściach adresowych układ zliczający głosy: TAK (1) , NIE (0) czterech osób. Funkcja F=1 wtedy gdy większość wskazała 1.