Seria Monograficzna nr 10
JERZY B. ROGOWSKI
MARIUSZ FIGURSKI
Instytut Geodezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej
ZIEMSKIE SYSTEMY I UKŁADY ODNIESIENIA
ORAZ ICH REALIZACJE
ZARYS TREŚCI: Ziemski system odniesienia stanowi podstawę do pro-wadzenia obserwacji nie tylko w geodezji, ale też w całej rodzinie nauk o Zie-mi. Do roku 1988 powszechnie używanym ziemskim systemem odniesienia był umowny system odniesienia, którego podstawowa oś była określana poprzez zmienne w czasie współrzędne bieguna chwilowego, a położenie umownego południka zerowego określane było jako odpowiadające południkowi zero-wemu średniego obserwatorium sieci stacji Międzynarodowej Służby Czasu. Położenie bieguna chwilowego i czas niezbędny do określania długości geo-graficznej wyznaczane były technikami astrometrycznymi. W pracy przedsta-wiono historię wyznaczeń pozycji bieguna realizowanych przez służby ILS, IPMS i BIH. Od 1988 r. współrzędne bieguna „chwilowego” wyznaczane są z bardzo wysoką dokładnością razem ze współrzędnymi obserwatoriów i ich pochodnymi względem czasu poprzez obserwacje sztucznych satelitów Ziemi i techniką VLBI. W pracy omówiono problemy związane z aktualną realizacją ziemskich układów odniesienia i rolą służby IERS w ich tworzeniu i konserwacji. Przedstawiono również parametry transformacji kolejnych wersji układu ITRF od ITRF88 do ITRF2000 i ich znaczenie praktyczne. Omówiono modele NUVEL-1, NUVEL-1A oraz NNR-NUVEL-1A. Przedsta-wiono układ ETRF89 oraz stosowane w Polsce układy współrzędnych i ich relacje do układu ITRF i WGS84. Podano także przykłady transformacji po-między układem ETRF i ITRF2000.
1. SŁUŻBY ILS, IPMS I BIH I ICH ROLA W TWORZENIU I KONSERWACJI ZIEMSKIEGO UKŁADU ODNIESIENIA
Rozwój naziemnych technik pomiarowych, pozwalających rozwijać sieci geodezyjne na dużych obszarach, spowodował konieczność zapewnienia równoległości osi układu współrzędnych astronomicznych do osi obrotu elip-soidy odniesienia. Równoległość ta jest spełniona dzięki stosowaniu równania Laplace’a (1) do redukcji azymutów na elipsoidę odniesienia (Heiskanen i Moritz 1966):
A – α = (Λ – λ) sinφ (1) gdzie: A i Λ – azymut i długość astronomiczna, α, φ i λ – odpowiednio
azy-mut, szerokość i długość geodezyjna.
Problem skomplikował się po opracowaniu przez Eulera w 1758 r. mo-delu matematycznego przemieszczania się osi obrotu względem bryły ziem-skiej (tzw. nutacji swobodnej). W związku z tym powstała konieczność okre-ślania położenia chwilowej osi obrotu Ziemi względem umownego ziemskie-go układu odniesienia oraz konieczność redukcji wyznaczanych współrzęd-nych astronomiczwspółrzęd-nych i azymutów do tego układu. Ze względu na wiele czynników, które zaburzały ruch bieguna opisany przez model matematyczny Eulera, wynikła potrzeba wyznaczania współrzędnych chwilowego bieguna Ziemi w sposób obserwacyjny.
Biorąc powyższe pod uwagę, Międzynarodowa Asocjacja Geodezji (IAG) w 1899 r. powołała Międzynarodową Służbę Szerokości (International Latitude Service, ILS).Biegun, który został określony na podstawie obserwa-cji zmian szerokości astronomicznych z lat 1900–1905, wyznaczył kierunek osi podstawowej pierwszego umownego układu odniesienia, definiowany przez pozycje (średnie szerokości astronomiczne) pięciu stacji obserwacyj-nych ILS: Carloforte (Włochy), Gaithersburg i Ukiah (USA), Kitab (Rosja), Mizusawa (Japonia), umieszczonych na równoleżniku 39°08′ (Mueller 1969).
Umowny południk zerowy został określony kilkanaście lat później. Wiązało się to z technicznymi możliwościami wyznaczania długości astrono-micznej, wymagającej możliwości transferu czasu Greenwich. Do zrealizo-wania tego zadania powołano w 1912 r. Międzynarodowe Biuro Czasu (Bure-au International de l’Heure, BIH). W tym okresie w zdecydowanej większości przypadków czas wyznaczano z obserwacji astronomicznych (Mueller 1969).
Ten pierwszy umowny ziemski układ odniesienia posiadał zasadniczą wadę. Określał on jedynie położenie osi układu, ale nie definiował jedno-znacznie położenia początku układu. Układ ten był więc układem swobodnym i zapewniał jedynie równoległość osi umownych: kontynentalnych, regional-nych i lokalregional-nych układów odniesienia do osi globalnego ziemskiego układu odniesienia.
Kolejnym etapem praktycznej realizacji ziemskich układów odniesienia technikami tradycyjnymi był układ odniesienia opracowany z obserwacji wy-konanych w ramach, powołanej w 1962 r. Międzynarodowej Służby Ruchu Bieguna (International Polar Motion Service, IPMS), stanowiącej rozwinięcie służby ILS poprzez włączenie do niej kilkudziesięciu obserwatoriów leżących na innych równoleżnikach.
Bardzo istotnym etapem rozwoju układów odniesienia realizowanych za pomocą technik tradycyjnych było przygotowanie przez BIH w 1968 r. metody łącznego opracowania obserwacji czasu i szerokości astronomicznej dla wyznaczania pozycji bieguna i czasu UT1. Tak opracowany układ odnie-sienia znany jest jako BIH68.
Stan taki trwał do początku lat sześćdziesiątych XX w. Po wyniesieniu na orbitę okołoziemską 4 października 1957 r. pierwszego sztucznego satelity Ziemi otworzyły się możliwości zastąpienia metod wyznaczania pozycji z pomiarów naziemnych (kątów, długości, różnic wysokości itp.) o zasięgu kontynentalnym metodami o zasięgu globalnym, wykorzystującymi pomiary pozycyjne i kinematyczne sztucznych satelitów Ziemi (początkowo kierun-ków, a później odległości i zmian odległości). Wprowadzenie przez BIH do opracowania pozycji bieguna i czasu UT1 obserwacji dopplerowskich sateli-tów systemu nawigacyjnego TRANSIT zwiastowało zmierzch ery obserwacji astrometrycznych w definiowaniu systemów odniesienia i praktycznej reali-zacji układów odniesienia.
Postępujący rozwój satelitarnych technik pomiarowych stworzył nowe możliwości definiowania globalnych systemów odniesienia, co doprowadziło w 1966 r. do opracowania przez Smithsonian Astrophysical Observatory (SAO), nowego, geocentrycznego układu odniesienia nazwanego Standard Earth III (Veis 1966). W wyniku tych prac w 1967 r. IUGG na Zgromadzenie Generalne w Lucernie, w porozumieniu z IAU wprowadziła nowy Geodezyj-ny System Odniesienia GRS67 (Geodetic Reference System 1967). Decyzja o jego wprowadzeniu okazała się przedwczesna. Elipsoidę GRS67, o parame-trach a = 6 378 160 m, f = 1/298.25 i układ odniesienia z nią związany wpro-wadzono tylko w Australii i części Ameryki Południowej.
2. LOKALNE I REGIONALNE UKŁADY ODNIESIENIA OPARTE NA KLASYCZNYCH TECHNIKACH POMIAROWYCH Orientacja geodezyjnego układu odniesienia względem umownej (śred-niej) osi obrotu Ziemi oraz zerowego południka umownego zapewniona była poprzez stosowanie do redukcji azymutów równania Laplace’a (1) oraz para-metrów ruchu obrotowego Ziemi (współrzędnych xp, yp bieguna chwilowego i czasu UT1 podawanego w postaci różnicy UT1 – UTC). Dla realizacji tak przyjętej orientacji konieczna jest znajomość składowej η odchylenia pionu w pierwszym wertykale. Obserwacje astronomiczne niezbędne do zastosowa-nia równazastosowa-nia Laplace’a w procesie orientacji elipsoidy odniesiezastosowa-nia muszą być
zredukowane do ziemskiego bieguna umownego, do czego potrzebne są współrzędne xp, yp bieguna chwilowego.
Położenie środka elipsoidy odniesienia względem środka masy Ziemi wynika ze sposobu przyłożenia elipsoidy do geoidy. Rozróżnia się dwa spo-soby przyłożenia elipsoidy:
przyłożenie jednopunktowe (φ = Φ, λ = Λ, α = A, N = 0),
przyłożenie wielopunktowe (elipsoida najlepiej dopasowana do obsza-ru) ∑N2 = min,
gdzie: Φ – szerokość astronomiczna, N – odstęp geoidy od elipsoidy odniesienia dla obszaru, na którym zakładana jest osnowa geodezyjna. Oba z przedstawionych wyżej rozwiązań uniemożliwiają jednak okre-ślenie technikami tradycyjnymi wartości przesunięcia środka elipsoidy względem środka mas Ziemi. W tym czasie powstawały więc dla każdego kraju lub grupy krajów różne systemy odniesienia (lokalne lub regionalne), których zasięg wynikał z uwarunkowań geometrycznych i politycznych.
3. UTWORZENIE EUROPEJSKIEGO UKŁADU ODNIESIENIA ED50
Historia powstania jednolitego geodezyjnego układu odniesienia w Eu-ropie sięga okresu poprzedzającego II wojnę światową, kiedy to pojawiły się koncepcje wspólnego opracowania triangulacji kontynentalnej. Prace podjęto jednak dopiero po II wojnie światowej. Opracowano łącznie triangulacje kra-jów Europy Zachodniej. Koordynowała je powołana przez IAG Komisja RE-Trig (Commission for the Re-Adjustment of the European Triangulation). W wyniku opracowania powstał nowy, jednolity układ odniesienia dla Europy – ED50. W procesie opracowania zastosowano elipsoidę Hayforda 1924 z punktem przyłożenia w Poczdamie.
W ciągu następnych kilkunastu lat układ ED50 był udoskonalany i mo-dernizowany. Służyły temu również kampanie satelitarnych obserwacji dop-plerowskich WEDOC i WEDOC-2. Prace były kontynuowane do 1987 r. a ich celem było opracowanie nowego europejskiego układu odniesienia ED87. Prac tych nie zakończono, bowiem podczas XIX Zgromadzenia Gene-ralnego Międzynarodowej Unii Geodezji i Geofizyki (IUGG) w 1987 r. w Vancouver powołano w ramach Komisji X IAG nową permanentną Pod-komisję EUREF (European Reference Frame) zastępującą Komisję RETrig.
Zadaniem, jakie postawiono przed Podkomisją EUREF, było opraco-wanie nowego układu odniesienia dla Europy, z wykorzystaniem satelitarnych i kosmicznych technik pomiarowych, w tym GPS. Decyzja ta ostatecznie przyczyniła się do zaprzestania prac nad układem ED87.
4. SYSTEMY ODNIESIENIA WGS72, WGS84 I GRS80 Światowy System Odniesienia WGS72 (World Geodetic System 1972) był trzecim geocentrycznym układem odniesienia opracowanym przez US DMA (Agencję Kartograficzną Ministerstwa Obrony Stanów Zjednoczonych Ameryki Północnej); poprzednimi wersjami były: WGS60 i WGS66 (Kryński i Rogowski 2004). System ten był używany do 27 stycznia 1989 r. zarówno w dopplerowskim systemie TRANSIT, jak i w systemie GPS. Jego praktycz-na realizacja w postaci układu odniesienia oparta była praktycz-na sieci stacji śledzą-cych systemu TRANSIT (TRANET). Udoskonalona wersja sustemu WGS72 to obecnie wykorzystywany powszechnie WGS84 (World Geodetic System 1984) (DMA 1991).
Pierwotnie system odniesienia WGS84 był oparty na współrzędnych sieci stacji TRANET uzyskanych wyłącznie z pomiarów dopplerowskich satelitów systemu TRANSIT. Pozwoliło to na stworzenie globalnie jednorod-nego układu odniesienia o dokładności rzędu 1–2 m, co wynikało z dokładno-ści pomiarów wykonywanych techniką dopplerowską. Prędkodokładno-ści zmian współrzędnych stacji zostały pominięte jako zaniedbywalne wobec osiąga-nych dokładności. Poprawę dokładności uzyskano po włączeniu do procesu poprawiania tego układu współrzędnych obserwacji wykonywanych techniką GPS. W procesie redefinicji i modernizacji systemu odniesienia WGS84 wy-korzystano wyznaczenie techniką GPS współrzędnych 10 stacji śledzących, wchodzących w skład segmentu kontrolnego systemu GPS. Obserwacje na tych stacjach używane są również do wyznaczenia i predykcji efemeryd oraz poprawek zegarów satelitarnych. Informacje uzyskane tą drogą stanowią ma-teriał wejściowy do przygotowania depeszy satelitarnej, która jest dostępna dla każdego odbiorcy sygnałów systemu GPS.
WGS84 jest światowym systemem odniesienia, wykorzystywanym głównie w geodezji i nawigacji, stworzonym i utrzymywanym przez Depar-tament Obrony USA (DoD). Głównym jego zadaniem jest zapewnienie moż-liwości dokładnego określenia położenia punktów i nawigowania w skali całego globu ziemskiego przy użyciu satelitarnych technik pozycjonowania.
Kilkuletnie doświadczenia zebrane w czasie eksploatacji systemu GPS wykazały niedoskonałości systemu odniesienia WGS84, przede wszystkim jego niską dokładność w stosunku do współczesnych potrzeb geodezji, geo-dynamiki i geofizyki. Podjęto zatem decyzję o redefinicji WGS84. Współ-rzędne wspomnianych wcześniej 10 stacji śledzących zostały poprawione w procesie opracowania kilkutygodniowych obserwacji GPS z 22 stacji glo-balnej sieci International GPS Service (IGS). Obserwacje te zostały wykorzy-stane zarówno do nowego wyznaczenia współrzędnych stacji, jak i do popra-wienia orbit satelitarnych udostępnianych w efemerydach pokładowych GPS. Osiem spośród wybranych stacji IGS, które posiadały najbardziej stabilne
współrzędne w układzie ITRF1, stanowiły nawiązanie pozostałej sieci (w su-mie 32 stacji). W opracowaniu wyników pomiarów przyjęto standardy zgodne z zaleceniami IERS2, co również wpłynęło na ostateczną jakość układu WGS84 (DMA 1991).
Wynikiem prac był nowy poprawiony system WGS84(G730); G730 oznacza epokę jego wprowadzenia, tj. 730 tydzień GPS. Moment ten jest po-czątkiem wprowadzenia operacyjnie poprawionego systemu WGS84. Nowy układ charakteryzuje się dokładnością 10 cm w skali globalnej i dla określenia prędkości zmian współrzędnych stacji śledzących, podobnie jak układ ITRF, wykorzystuje model ruchu płyt tektonicznych NUVEL-13. Od początku 1994 r. DMA (obecnie NIMA) wykorzystuje system WGS84(G730) do obli-czania orbit satelitów GPS (efemeryd pokładowych). WGS84, podobnie jak układ ITRF, podlegał kolejnym redefinicjom (G873 i G1150) (EUROCONTROL 1995).
W okresie prowadzenia prac nad systemem WGS, XIV Zgromadzenie Generalne IUGG w grudniu 1979 r. w Canberze przyjęło rezolucję wprowa-dzającą nowy Geodezyjny System Odniesienia GRS80 (Geodetic Reference System 1980). Jego elementami były parametry geometryczne i fizyczne elip-soidy: a = 6 378 137 m, GM = 3 986 005 ×108 m3s-2, J
2 = 108 263 × 10-8 oraz prędkość kątowa Ziemi ω = 7 292 115 × 10-11 rad s-1. System GRS80 zdefi-niowano jako geocentryczny oraz przyjęto, że mała półoś elipsoidy odniesie-nia systemu będzie równoległa do osi CIO (Kryński i Rogowski 2004), a płaszczyzna południka zerowego będzie równoległa do południka zerowego Średniego Obserwatorium BIH.
5. SŁUŻBA IERS I JEJ ROLA W TWORZENIU I KONSERWACJI ZIEMSKICH UKŁADÓW ODNIESIENIA
Postępujący rozwój satelitarnych technik pomiarowych, początkowo fotograficznych, a następnie dopplerowskich i laserowych, skłonił do prze-prowadzenia w 1980 r. krótkiej kampanii testowej MERIT (Monitoring of the Earth Rotation and Intercomparison of the Techniques), mającej na celu po-równanie różnych technik pomiarowych w wyznaczaniu parametrów ruchu obrotowego Ziemi i konserwacji układów odniesienia (Melbourne i in. 1983). Uzyskane pozytywne wyniki kampanii testowej były podstawą do zorganizo-wania w latach 1983–1984 właściwej kampanii MERIT. Wyniki kampanii MERIT wykazały wyższość technik satelitarnych nad pomiarami astrome-trycznymi i posłużyły do zdefiniowania nowego ziemskiego systemu odnie-sienia. Tym nowym systemem, wprowadzonym przez BIH w 1984 r. został ziemski system odniesienia BTS84 (BIH Terrestrial System), opracowany głównie na podstawie obserwacji VLBI, SLR i satelitarnych obserwacji
1 Układ ITRF omówiono w rozdziale 5.
2 Zadania służby IERS omówiono w rozdziale 5.
plerowskich. Przy jego opracowaniu po raz pierwszy zastosowano model prędkości płyt tektonicznych AMO-2. Wyniki kampanii MERIT przesądziły o powołaniu nowej służby mającej za zadanie wyznaczanie parametrów ruchu obrotowego Ziemi i konserwację układów odniesienia. Została nią Międzyna-rodowa Służba Ruchu Obrotowego Ziemi IERS (International Earth Rotation Service) powołana w 1987 r. przez IUGG i Międzynarodową Unię Astrono-miczną IAU. W wyniku tej decyzji w 1988 r. służba BIH została zastąpiona przez służbę IERS. Jednocześnie wprowadzono nowy układ odniesienia – – ITRF (International Terrestrial Reference Frame), realizujący wprowadzony na mocy rezolucji IUGG w 1991 r. Międzynarodowy Ziemski System Odnie-sienia ITRS (International Terrestrial Reference System).
ITRF powinien spełniać następujące wymagania, wymuszone przez dy-namicznie rozwijające się globalne technologie pomiarowe (Hofmann- -Wellenhof i in. 1997):
układ geocentryczny o początku w środku mas Ziemi (łącznie z oce-anami i atmosferą),
orientacja osi zgodna z orientacją BIH dla epoki 1984 (BTS84) (Kryń-ski i Rogow(Kryń-ski 2004),
model prędkości stacji nie posiada poprawek w odniesieniu do ruchów skorupy ziemskiej.
Układ ITRF jest układem kinematycznym, bowiem definiują go współ-rzędne stacji służby IERS, podane na określoną epokę i ich pochodne wzglę-dem czasu. W 2003 r. służba IERS została przemianowana na Międzynaro-dową Służbę Ruchu Obrotowego Ziemi i Systemów Odniesienia (Internatio-nal Earth Rotation and Reference Systems Service), zachowując swój po-przedni akronim. Do zadań IERS należą (IERS 1996):
definicja Międzynarodowego Niebieskiego Systemu Odniesienia ICRS i jego realizacja w postaci układu odniesienia ICRF,
definicja Międzynarodowego Ziemskiego Systemu Odniesienia ITRS i jego realizacja w postaci układu odniesienia ITRF,
wyznaczanie parametrów orientacji Ziemi (Earth Orientation Parame-ters, EOP) i ich zmian, wykorzystywanych do transformacji pomiędzy ICRF i ITRF,
analiza danych geofizycznych do interpretacji zmian ICRF, ITRF, EOP i ich modelowanie,
określenie standardów, stałych i modeli (konwencje).
IERS zrzesza następujące służby obserwacyjne dla różnych technik pomiarowych:
Międzynarodową Służbę GPS/GLONASS (IGS),
Międzynarodową Służbę Pomiarów Laserowych Odległości (ILRS), Międzynarodową Służbę VLBI (IVS),
6. PRĘDKOŚCI PŁYT TEKTONICZNYCH – MODEL NUVEL-1A
Absolutny ruch płyt tektonicznych można przedstawić, wykorzystując modele globalne. Jednym z nich jest model NUVEL-1, który uznany został za najdokładniejszy i od 1992 r. jest zalecany przez IERS. Do wyznaczenia war-tości wektorów rotacji tego modelu użyto ponad tysiąc danych geofizycznych pochodzących z 22 granic płyt tektonicznych. Dały one znaczną poprawę modelu ruchu płyt względem poprzednich modeli (P071 i RM2). Zawierały one m.in. tempa rozrostu dna oceanicznego, azymuty uskoków transformują-cych oraz dane dotyczące trzęsień Ziemi (de Mets i in. 1990). Przewagą mo-delu NUVEL nad poprzednimi P071 i RM2 z 1978 r. jest wykorzystanie róż-nego rodzaju informacji geofizycznych i geodynamicznych (de Mets i in. 1990) odniesionych do średniego momentu czasu, w którym przypadało wy-stępowanie anomalii magnetycznej w warstwie 2A4 (Sandwell 2001).
Do konstrukcji globalnego modelu ruchu płyt tektonicznych wykorzy-stano dane z czterech źródeł:
dane magnetyczne i batymetryczne, a w niektórych przypadkach także wyznaczone z danych altimetrycznych satelity Seasat pochodne wzdłuż śladu orbity satelity; na ich podstawie oszacowano prędkości wzajem-nego rozchodzenia się płyt, przetransformowano azymuty uskoków oraz ich błędy; wektory przesunięć uskoków obliczono, wykorzystując dostępne dane dotyczące mechanizmów nacisku oraz oszacowano błędy tych wektorów;
dane dotyczące ruchu płyty wzdłuż jej granicy; wyznaczono najlepiej dopasowane wartości wektorów prędkości kątowej, przeanalizowano wewnętrzną zgodność danych i porównano wyniki z wynikami wcze-śniejszych badań;
z analizy warunków zamknięcia na obwodach płyt5 z danych opisują-cych ruch względny w punktach spotkania się trzech lub więcej płyt; z jednoczesnego przetworzenia danych pochodzących ze wszystkich
płyt w celu wyznaczenia zbioru wektorów Eulera najlepiej pasujących w sensie najmniejszych kwadratów do danych; dodatkowym
4 Warstwa 2A występuje bezpośrednio pod wastwą osadów oceanicznych
wzdłuż grzbietów oceanicznych zwiazanych z rozrostem dna oceanu. Warstwa ta charakteryzuje się występowaniem zwiększonej anomalii magnetycznej (Dadlez i Jaroszewski 1994).
5 Warunek zamknięcia oznacza, że suma wektorów Eulera lub wektorów
pręd-kości kątowych opisujących względny ruch każdej pary płyt musi być równa zero (Gordon i in. 1987). Jest to standardowa metoda badania spójności danych opisują-cych ruch względny w punktach spotkania się trzech płyt.
kiem narzuconym w procesie wpasowania była zgodność z globalnym ruchem płyt tektonicznych.
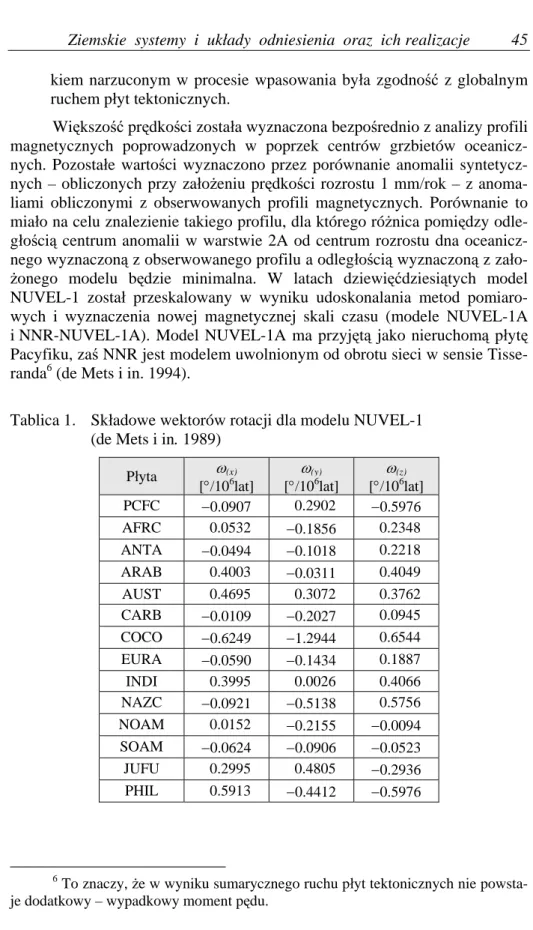
Większość prędkości została wyznaczona bezpośrednio z analizy profili magnetycznych poprowadzonych w poprzek centrów grzbietów oceanicz-nych. Pozostałe wartości wyznaczono przez porównanie anomalii syntetycz-nych – obliczosyntetycz-nych przy założeniu prędkości rozrostu 1 mm/rok – z anoma-liami obliczonymi z obserwowanych profili magnetycznych. Porównanie to miało na celu znalezienie takiego profilu, dla którego różnica pomiędzy odle-głością centrum anomalii w warstwie 2A od centrum rozrostu dna oceanicz-nego wyznaczoną z obserwowaoceanicz-nego profilu a odległością wyznaczoną z zało-żonego modelu będzie minimalna. W latach dziewięćdziesiątych model NUVEL-1 został przeskalowany w wyniku udoskonalania metod pomiaro-wych i wyznaczenia nowej magnetycznej skali czasu (modele NUVEL-1A i NNR-NUVEL-1A). Model NUVEL-1A ma przyjętą jako nieruchomą płytę Pacyfiku, zaś NNR jest modelem uwolnionym od obrotu sieci w sensie Tisse-randa6 (de Mets i in. 1994).
Tablica 1. Składowe wektorów rotacji dla modelu NUVEL-1 (de Mets i in. 1989)
Płyta (x)
[/106lat] [/10(y)6lat] [/10(z)6lat]
PCFC 0.0907 0.2902 0.5976 AFRC 0.0532 0.1856 0.2348 ANTA 0.0494 0.1018 0.2218 ARAB 0.4003 0.0311 0.4049 AUST 0.4695 0.3072 0.3762 CARB 0.0109 0.2027 0.0945 COCO 0.6249 1.2944 0.6544 EURA 0.0590 0.1434 0.1887 INDI 0.3995 0.0026 0.4066 NAZC 0.0921 0.5138 0.5756 NOAM 0.0152 0.2155 0.0094 SOAM 0.0624 0.0906 0.0523 JUFU 0.2995 0.4805 0.2936 PHIL 0.5913 0.4412 0.5976
6 To znaczy, że w wyniku sumarycznego ruchu płyt tektonicznych nie
Do obliczenia składowych wektora prędkości płyty w punkcie stosuje się następujące wzory:
VX = ω(x)Z0 – ω(z)Y0
VY = ω(z)X0 – ω(x)Z0 (2)
VZ = ω(x)Y0 – ω(y)X0 gdzie: X0, Y0, Z0 – współrzędne punktu,
ω(x), ω(y), ω(z) – zestawione w tablicy 1 składowe wektorów rotacji dla poszczególnych płyt tektonicznych.
W rezultacie prac prowadzonych w DGFI w 1998 r. został opublikowa-ny model APKIM (Drewes 1998). Powstał on w wyniku estymacji wektorów obrotu czasz sferycznych dla obszarów dających się modelować ruchem sztywnej płyty. Dla stref kontaktowych (takich jak Andy, strefa Morza Śród-ziemnego, Kalifornia i Wschodnia Azja) zastosowano estymację metodą ele-mentów skończonych. Model ten jest modelem uwolnionym od obrotu sieci w sensie Tisseranda.
7. ITRF88 – ITRF2000, PRZEGLĄD PARAMETRÓW TRANSFORMACJI I ICH ZNACZENIE PRAKTYCZNE Badania geodynamiczne i prace geodezyjne prowadzone w skali glo-balnej wymagają zdefiniowania jednolitego pod względem geometrycznym i fizycznym układu odniesienia. Rozwój technik i metod pomiarowych i wzra-stająca ich dokładność pociąga za sobą konieczność zmiany w opisie zjawisk fizycznych; oba te czynniki prowadzą do powstania warunków do coraz do-kładniejszych realizacji układów odniesienia. Odnosi się to w szczególności do kolejnych realizacji układu odniesienia – ITRF. W latach 1988– –1994 ITRF ulegał corocznym modyfikacjom. Po 1994 r. zmiany te nie były tak regularne (tabl. 2). Bezpośredni wpływ na to miały dołączane nowe zbiory wykonywanych stale obserwacji i nowe techniki pomiarowe, a także stale zwiększająca się liczba globalnych stacji permanentnych GPS. Do stacji dzia-łających początkowo w ramach IGS dołączane były później sieci stacji regio-nalnych takich jak EUREF Permanent Network (EPN). Konieczność wpro-wadzania nowych realizacji układu ITRF wynikała z wysokich wymagań dokładnościowych stawianych temu układowi, wynikających zarówno z po-trzeb naukowych, jak i praktycznych.
Prędkości stacji w kolejnych realizacjach układu ITRF były wyznacza-ne z modelu NUVEL-1 bez uwzględnienia rotacji. Połączenie tego z nierów-nomiernym rozmieszczeniem stacji definiujących ITRF (zdecydowana ich większość rozmieszczona jest na obszarach kontynentalnych półkuli północ-nej) spowodowało rotację między wczesnymi wersjami układu ITRF, na
po-ziomie 0.2 mas/rok, która po akumulacji w 1992 r. wyniosła 1 mas (IERS 1993).
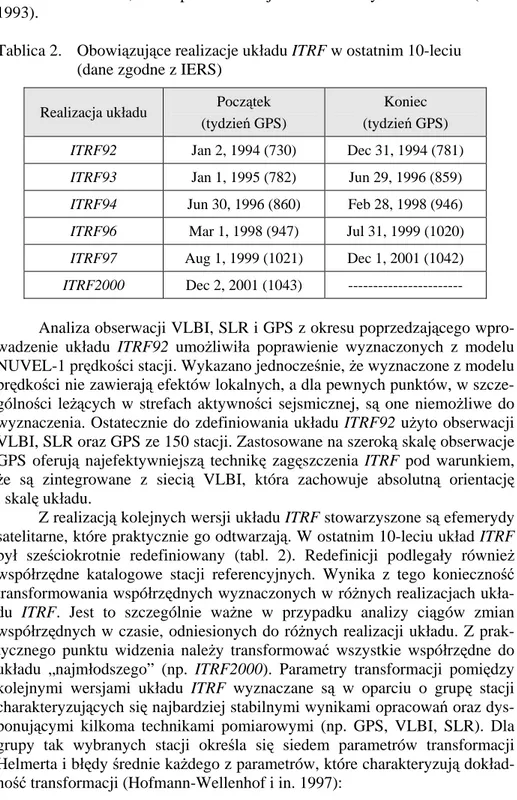
Tablica 2. Obowiązujące realizacje układu ITRF w ostatnim 10-leciu (dane zgodne z IERS)
Realizacja układu Początek
(tydzień GPS)
Koniec (tydzień GPS)
ITRF92 Jan 2, 1994 (730) Dec 31, 1994 (781)
ITRF93 Jan 1, 1995 (782) Jun 29, 1996 (859)
ITRF94 Jun 30, 1996 (860) Feb 28, 1998 (946)
ITRF96 Mar 1, 1998 (947) Jul 31, 1999 (1020)
ITRF97 Aug 1, 1999 (1021) Dec 1, 2001 (1042)
ITRF2000 Dec 2, 2001 (1043) ---
Analiza obserwacji VLBI, SLR i GPS z okresu poprzedzającego wpro-wadzenie układu ITRF92 umożliwiła poprawienie wyznaczonych z modelu NUVEL-1 prędkości stacji. Wykazano jednocześnie, że wyznaczone z modelu prędkości nie zawierają efektów lokalnych, a dla pewnych punktów, w szcze-gólności leżących w strefach aktywności sejsmicznej, są one niemożliwe do wyznaczenia. Ostatecznie do zdefiniowania układu ITRF92 użyto obserwacji VLBI, SLR oraz GPS ze 150 stacji. Zastosowane na szeroką skalę obserwacje GPS oferują najefektywniejszą technikę zagęszczenia ITRF pod warunkiem, że są zintegrowane z siecią VLBI, która zachowuje absolutną orientację i skalę układu.
Z realizacją kolejnych wersji układu ITRF stowarzyszone są efemerydy satelitarne, które praktycznie go odtwarzają. W ostatnim 10-leciu układ ITRF był sześciokrotnie redefiniowany (tabl. 2). Redefinicji podlegały również współrzędne katalogowe stacji referencyjnych. Wynika z tego konieczność transformowania współrzędnych wyznaczonych w różnych realizacjach ukła-du ITRF. Jest to szczególnie ważne w przypadku analizy ciągów zmian współrzędnych w czasie, odniesionych do różnych realizacji układu. Z prak-tycznego punktu widzenia należy transformować wszystkie współrzędne do układu „najmłodszego” (np. ITRF2000). Parametry transformacji pomiędzy kolejnymi wersjami układu ITRF wyznaczane są w oparciu o grupę stacji charakteryzujących się najbardziej stabilnymi wynikami opracowań oraz dys-ponującymi kilkoma technikami pomiarowymi (np. GPS, VLBI, SLR). Dla grupy tak wybranych stacji określa się siedem parametrów transformacji Helmerta i błędy średnie każdego z parametrów, które charakteryzują dokład-ność transformacji (Hofmann-Wellenhof i in. 1997):
Z Y X s s s T T T Z Y X z y x x y x z y z z y x (3)
gdzie: x, y, z – współrzędne wyznaczane, X, Y, Z – współrzędne w układzie ITRF,
Tx, Ty, Tz – składowe wektora przesunięcia pomiędzy środkami układów,
s – współczynnik zmiany skali,
ωx, ωy, ωz – kąty obrotów wokół odpowiednich osi układu.
Tablica 3. Parametry transformacji Helmerta między układem ITRF2000 a kolejnymi wcześniejszymi jego realizacjami (oficjalne parame-try publikowane przez IERS)
Układ Tx [cm] Ty [cm] Tz [cm] s [ppb] ωx 0".001 ωy 0".001 ωz 0".001 Epoka ITRF97 0.67 0.61 1.85 1.55 0.00 0.00 0.00 1997 ITRF96 0.67 0.61 1.85 1.55 0.00 0.00 0.00 1997 ITRF94 0.67 0.61 1.85 1.55 0.00 0.00 0.00 1997 ITRF93 1.27 0.65 2.09 1.95 0.39 0.80 1.14 1988 ITRF92 1.47 1.35 1.39 0.75 0.00 0.00 0.18 1988 ITRF91 2.67 2.75 1.99 2.15 0.00 0.00 0.18 1988 ITRF90 2.47 2.35 3.59 2.45 0.00 0..0 0.18 1988 ITRF89 2.97 4.75 7.39 5.85 0.00 0.00 0.18 1988 ITRF88 2.47 1.15 9.79 8.95 0.10 0.00 0.18 1988
Uzyskane w wyniku transformacji residua dla stacji definiujących układ odniesienia podlegają dokładnym analizom i jeżeli przekraczają założo-ne kryteria wynikające z uzyskanych wartości błędów średnich, mogą kwali-fikować stację do wyeliminowania spośród grupy stacji definiujących układ odniesienia. Jednak przed dokonaniem tak rygorystycznej operacji należy bardzo dokładnie zbadać wszystkie odchyłki i dokonać ewentualnych korekt współrzędnych, jeżeli otrzymane odchyłki są wynikiem skumulowanych błę-dów systematycznych. Z reguły ma to miejsce wówczas, gdy porównaniu poddawane są układy współrzędnych definiowane w oparciu o różne techniki pomiarowe. Tego typu poprawki w sposób naturalny podnoszą jakość każde-go układu odniesienia i dzięki eliminacji błędów znacząco zwiększają jekażde-go
praktyczną wartość. Typowym przykładem takiej operacji jest układ WGS84(G730), który powstał w wyniku wprowadzenia poprawek do orygi-nalnej definicji układu WGS84, a powodem były wymagania dokładnościowe systemu GPS.
Przykłady parametrów transformacji pomiędzy kilkoma wybranymi układami odniesienia a układem ITRF92 są podane w tablicy 4.
Tablica 4. Parametry transformacji Helmerta wybranych układów odniesie-nia do układu ITRF92 (epoka 1988.0)
Układ odniesienia Tx [cm] Ty [cm] Tz [cm] s [ppm] ωx [mas] ωy [mas] ωz [mas] RMS [cm] NAD83 94.0 198.0 54.0 0.0050 27.5 15.5 10.7 2 WGS84 6.0 52.0 22.0 0.0110 18.4 0.3 7.0 <200 WGS84GPS 4.0 1.0 28.0 0.2180 4.2 4.0 15.6 94 WGS730 0.0 3.0 4.0 0.0000 2.6 2.5 0.4 6 ITRF93 0.2 0.7 0.7 0.0012 0.39 0.8 0.96 <1
Dokładność ziemskich układów odniesienia w ostatniej dekadzie po-prawiła się prawie o dwa rzędy wielkości. Efekt ten uzyskano dzięki zastoso-waniu doskonalonych technik pomiarowych, takich jak VLBI, i technik geo-dezji satelitarnej.
8. ETRF89 JAKO PODZBIÓR UKŁADU ITRF89
Na Zgromadzeniu Generalnym IUGG w Vancouver w 1987 r. powstała koncepcja nowego układu odniesienia dla kontynentu europejskiego. Z tej inicjatywy powołana została specjalna podkomisja EUREF, której powierzo-no opracowanie podstaw naukowych tego przedsięwzięcia. Jedpowierzo-nocześnie or-ganizacja Comiteé Europeén des Responsables de la Cartographie Officielle (CERCO) zajęła się względami czysto praktycznymi w kontekście potrzeb geodezji i kartografii. Z jej inicjatywy zostały też podjęte decyzje, które po-zwoliły wprowadzić projekt w fazę realizacji. Obydwie organizacje, pomimo problemów związanych z określeniem koncepcji i zadań przyszłej sieci kon-tynentalnej, dążyły do utworzenia Europejskiego Ziemskiego Systemu Odnie-sienia ETRS (European Terrestrial Reference System) (Seeger 1993), zastępu-jącego system ED50.
Obowiązujące wówczas ziemskie układy odniesienia z jednej strony nie gwarantowały zakładanej (geodezyjnej) dokładności pomiarów (układ WGS84), z drugiej strony adaptowanie układu ITRF na potrzeby praktyczne było trudne, bowiem występowały znaczące różnice pomiędzy pojawiającymi
się jego kolejnymi wersjami. Dla celów praktycznych stosuje się współrzędne elipsoidalne wykorzystujące elipsoidę GRS80, której wymiary nie odbiegają znacząco (mniej niż 1 cm) od wymiarów elipsoidy WGS84. Dla zapewnienia zgodności z układem ITRF do jego zdefiniowania wykorzystano sieć stacji SLR i VLBI leżących w Europie i wchodzących do realizacji układu ITRF89. W ten sposób układ European Terrestrial Reference Frame (ETRF) został precyzyjnie zdefiniowany i stał się podzbiorem układu ITRF89. Z uwagi na ciągły ruch płyt tektonicznych układ ETRF będzie zmieniał się w stosunku do układu ITRF z prędkością 1–3 cm/rok. Jednocześnie prawie nie ulega on de-formacji wewnętrznej, poza lokalnymi ruchami tektonicznymi. W związku z tym można mu przypisać epokę początkową (referencyjną), a następnie wyznaczyć parametry transformacji w stosunku do układu ITRF lub WGS84.
Sieć punktów definiujących ETRF została zrealizowana z wykorzysta-niem pomiarów GPS. W jej skład weszło kilkadziesiąt punktów, w tym rów-nież punkty fundamentalne. Pierwsza kampania obserwacyjna została prze-prowadzona w maju 1989 r. z wykorzystaniem odbiorników GPS czterech różnych typów. Pomimo problemów wynikających z przyjęcia strategii wyko-rzystującej punkty fundamentalne, została ona wykorzystywana do realizacji ETRF. Na podstawie kampanii obserwacyjnych przeprowadzonych do 1989 r. dokonano wyboru 15 stacji, których współrzędne przyjęto jako stałe dla zde-finiowania układu European Terrestrial Reference Frame 1989 (ETRF89). Każda z wybranych stacji była umieszczona na płycie Euro-Azjatyckiej; sieć składała się z 7 stacji VLBI i 8 stacji SLR; jako układ odniesienia przyjęto ITRF89; jako epokę odniesienia przyjęto 1 stycznia 1989 r. Układ otrzymał nazwę ETRF89, a definiujący go system European Terrestrial Reference Sys-tem 1989 (ETRS89). Układ ETRF89 jest wykorzystywany obecnie przez zde-cydowaną większość państw europejskich.
Od roku 1997 układ ETRF89 jest realizowany przez sieć EPN (http://www.epncb.oma.be). Jako punkty nawiązania, od 1148 tygodnia GPS, wykorzystywane jest 12 stacji (BOR1, GRAZ, KOSG, MATE, ONSA, POTS, REYK, WTZR, VILL, GRAS, NYA1 i TRO1).
Układ ETRF, podobnie jak układ ITRF, jest układem kinematycznym. Jego realizacja i utrzymanie wymaga ciągłego monitorowania za pośrednic-twem odpowiednio rozmieszczonych permanentnych stacji GPS tworzących sieć EPN. Dokładne określenie zmian w czasie współrzędnych stacji, wyma-ganych do nawiązania wykonanych w dowolnej epoce obserwacji GPS do obowiązującego układu ETRF89, możliwe jest jedynie wtedy, gdy odpowied-nio blisko położone stacje permanentne prowadzą obserwacje w sposób cią-gły. Dopiero wieloletnie ciągi obserwacji z danej stacji, opracowywane wraz z obserwacjami innych stacji EPN, dostarczają dostatecznej infor-macji o zmienności współrzędnych stacji. Odpowiednio rozmieszczone i sprawnie funkcjonujące stacje permanentne sieci EPN są niezbędne do wy-rażenia w obowiązującym układzie ETRF89 wyników obserwacji
wykona-nych w aktualnie używanej realizacji systemu globalnego ITRS (obecnie ITRF2000).
Współrzędne punktów wyznaczane są w układzie ITRF (w aktualnej jego realizacji), dlatego przejście do układu ETRF89 zaleca się wykonać we-dług następującego algorytmu (Boucher i Altamimi 2001):
Krok 1. Obliczenie współrzędnych wyrażonych w ITRF na epokę tc
Operacja ta ma na celu przeliczenie współrzędnych katalogowych w układzie ITRF z epoki odniesienia t0 na epokę obserwacji tc z wykorzysta-niem danych IERS. Współrzędne na epokę obserwacji przeliczane są przy użyciu wektorów prędkości stacji IGS, które były wykorzystane do transfor-macji sieci swobodnej do układu ITRF. Składowe prędkości VITRF można uzy-skać z raportów IERS (ITRF Velocity Field). Do określenia wektorów pręd-kości stacji nieumieszczonych w katalogach używany jest model geofizyczny ruchu płyt tektonicznych NNR-NUVEL-1A. Drugi przypadek dotyczy punk-tów nowych lub tych, co do których istnieją wątpliwości dotyczące popraw-ności określenia prędkości. W konsekwencji nowe współrzędne na epokę obserwacji tc wyznaczane są przy użyciu następującej formuły:
t X
t0 V
t t0
XITRF c ITRF ITRF c (4)
Uzyskane w ten sposób współrzędne przyjmowane są a priori do opra-cowania obserwacji satelitarnych GPS/GLONASS (Figurski 2002).
Krok 2. Transformacja współrzędnych wyrażonych w ITRF na epokę tc do układu ETRF89 na epokę t
Operacja wymaga wprowadzenia systematycznego przesunięcia układu ITRF względem ETRF89, ale bez zmiany skali układu ITRF. Tak sformuło-wane zadanie realizosformuło-wane jest według następującej zależności:
1989.0
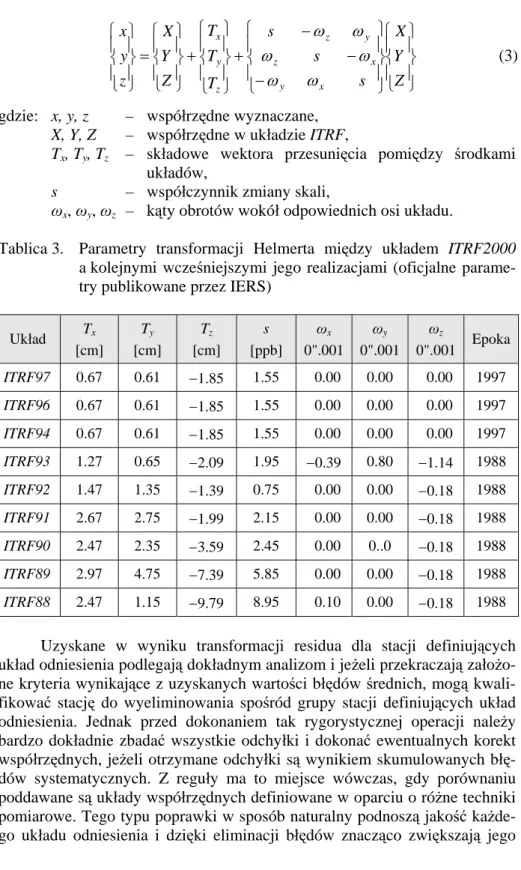
0 0 0 c ITRF ITRF ITRF x y x z y z z y x ITRF ITRF ITRF 89 ETRF 89 ETRF 89 ETRF t Z Y X T T T Z Y X Z Y X (5)Wektor (Tx, Ty, Tz)T reprezentuje systematyczne przesunięcie początku układu (translację). Druga część równania reprezentuje zmiany współrzęd-nych, wywołane ruchem płyty od epoki 1989.0 do epoki obserwacji tc; pręd-kości rotacji przyjmuje się z modelu NNR-NUVEL-1A, poprawione o różnice prędkości pomiędzy ITRF a NUVEL7. Parametry transformacji pomiędzy ITRF i ETRF89 są publikowane przez komisję EUREF dla każdej kolejnej realizacji układu ITRF (tabl. 5).
Krok 3. Transformacja współrzędnych w ETRF89 od epoki tc do epoki 1989.0
Ostatnim krokiem jest przeprowadzenie współrzędnych do epoki 1989.0 przez wprowadzenie poprawki:
ETRF
c ETRF
c
ETRF X t V t
X 1989.0 1989.0 (6)
Wektory prędkości dla poszczególnych stacji są niewielkie, z wyjąt-kiem Skandynawii, gdzie zmiany współrzędnych w ETRF są znaczące. Wy-konane w ostatnich latach badania w rejonie Skandynawii szacują ruch pio-nowy na około 8 mm/rok. Dlatego wyłączając rejon Skandynawii, można przyjąć w przybliżeniu, że VETRF = 0.
Tablica 5. Wartości parametrów transformacji pomiędzy układami ITRFyy i ETRF ITRFyy Tx [cm] Ty [cm] Tz [cm] x [mas/rok] y [mas/rok] z [mas/rok] 89 0 0 0 0.110 0.570 0.710 90 1.9 2.8 2.3 0.110 0.570 0.710 91 2.1 2.5 3.7 0.210 0.520 0.680 92 3.8 4.0 3.7 0.210 0.520 0.680 93 1.9 5.3 2.1 0.320 0.780 0.670 94 4.1 4.1 4.9 0.200 0.500 0.650 96 4.1 4.1 4.9 0.200 0.500 0.650 97 4.1 4.1 4.9 0.200 0.500 0.650 00 5.4 5.1 4.8 0.081 0.490 0.792 Przykład transformacji
Obliczenie współrzędnych stacji JOZE (Józefosław) w układzie ETRF89. Obserwacje zostały wykonane w układzie ITRF2000 w epoce 11 marca 2003. Po opracowaniu obserwacji uzyskano wektor geocentryczny stacji o składowych: 3661 . 5009571 8388 . 1409153 2035 . 3664940 ITRF ITRF ITRF Z Y X 19 . 2003 c t (2003.03.11)
Podstawiając powyższe wartości do równania (4), otrzymuje się współ-rzędne JOZE w ETRF89 na epokę tc:
1989.0
0 000081 . 0 000490 . 0 000081 . 0 0 000792 . 0 000490 . 0 000792 . 0 0 048 . 0 051 . 0 054 . 0 c ITRF ITRF ITRF ITRF ITRF ITRF 89 ETRF 89 ETRF 89 ETRF t Z Y X Z Y X Z Y XWykonując wskazane działania macierzowe, uzyskuje się współrzędne w ETRF89 (epoka 1989.0), zakładając, że 0VETRF :
2019 . 5009571 6612 . 1409153 5042 . 3664940 ETRF ETRF ETRF Z Y X
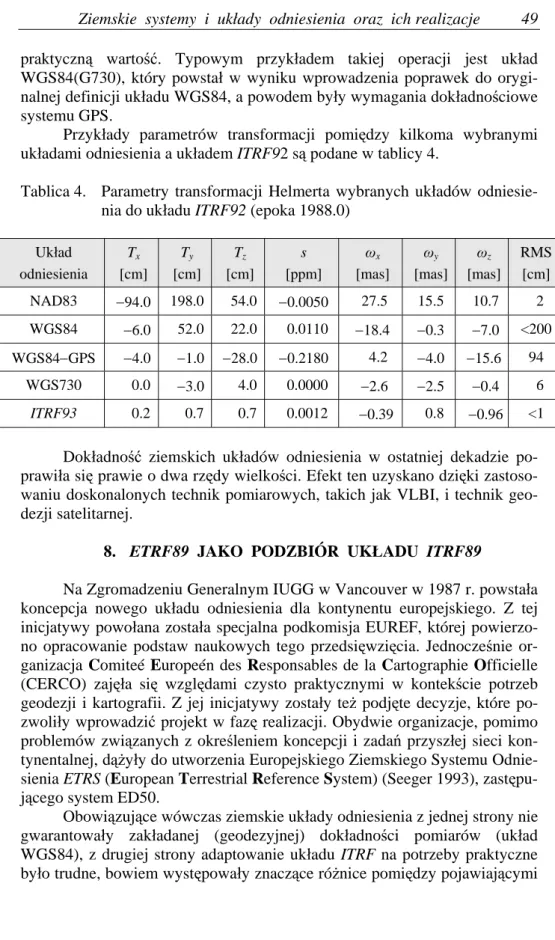
W tablicy 6 zestawiono współrzędne w układzie ETRF89 wszystkich stacji sieci WUT-EPN, które są opracowywane od 1996 roku w WUT Local Analysis Centre (Figurski 2002 ). Współrzędne te są odniesione do punktów referencyjnych anten (ARP) zainstalowanych na poszczególnych stacjach.
8. ZIEMSKIE UKŁADY ODNIESIENIA STOSOWANE W POLSCE
Ziemskie przestrzenne systemy odniesienia stosowane w Polsce można podzielić ze względu na technikę zastosowaną do wyznaczenia współrzęd-nych punktów definiujących związany z systemem układ odniesienia na: sys-temy zdefiniowane w epoce, w której pomiary wykonywano metodami trady-cyjnymi i systemy zdefiniowane w okresie, gdy powszechne zastosowanie znalazły metody kosmiczne i satelitarne. Naturalną konsekwencją tego po-działu jest zgodnie z rozważaniami zawartymi w rozdziale 2 niniejszej pracy podział na geocentryczne i niegeocentryczne układy odniesienia.
System odniesienia określony jest poprzez definicję orientacji w przestrzeni osi i położenia początku systemu, a także metrykę (skalę) (Kryński i Rogowski 2004). Przestrzenny system odniesienia może też opi-sywać elipsoidę odniesienia i odwzorowanie dające współrzędne płaskie sto-sowane w praktyce geodezyjnej.
Tablica 6. Współrzędne stacji permanentnych sieci WUT-EPN wyrażone w układzie ETRF89 Stacja X [m] Y [m] Z [m] BUCU 11401M001 4 093 761.2026 2 007 793.5699 4 445 129.7621 POLV 12336M001 3 411 557.7345 2 348 463.7961 4 834 396.7109 BOGI 12207M003 3 633 815.6743 1 397 453.9163 5 035 280.7891 SPT0 10425M001 3 328 984.8374 761 910.0793 5 369 033.5083 BOR1 12205M002 3 738 358.7791 1 148 173.5004 5 021 815.5838 WTZR 14201M010 4 075 580.8545 931 853.5686 4 801 567.9298 BOGO 12207M002 3 633 739.3044 1 397 433.9261 5 035 353.2778 METS 10503S011 2 892 571.1385 1 311 843.2825 5 512 633.9746 GOPE 11502M002 3 979 316.4313 1 050 312.2528 4 857 066.8898 WROC 12217M001 3 835 751.6117 1 177 249.7401 4 941 605.0413 GLSV 12356M001 3 512 889.3317 2 068 979.6785 4 888 903.0279 HOFN 10204M002 2 679 690.2016 727 951.3763 5 722 789.1241 NYA1 10317M003 1 202 434.1606 252 632.2311 6 237 772.4819 JOEN 10512M001 2 564 139.4500 1 486 149.6219 5 628 951.2907 KIRU 10403M002 2 251 421.1289 862 817.0960 5 885 476.5590 VARS 10322M002 1 844 607.6502 1 109 719.1089 5 983 936.0232 JOZE 12204M001 3 664 940.5030 1 409 153.6612 5 009 571.2015 KRAW 12218M001 3 856 936.1586 1 397 750.4691 4 867 719.4296 RIGA 12302M002 3 183 899.5505 1 421 478.3146 5 322 810.6311 KELY 43005M001 1 575 559.2940 1 941 827.9865 5 848 076.3505 THU3 43001M002 538 093.7890 1 389 088.0445 6 180 979.1558 LAMA 12209M001B 3 524 523.2582 1 329 693.4308 5 129 846.1597 MOPI 11507M001 4 053 738.2089 1 260 571.3787 4 744 940.6656 ONSA 10402M004 3 370 658.8497 711 876.9515 5 349 786.7737 VLNS 10801M001 3 343 600.9744 1 580 417.5526 5 179 337.1200 PENC 11206M006 4 052 449.8082 1 417 680.8993 4 701 406.9126 TRAB 20808M001 3 705 250.7755 3 084 421.4860 4 162 044.5915 SULP 12366M001 3 765 297.3429 1 677 558.9936 4 851 297.2195 UZHL 12301M001 3 907 587.7914 1 602 428.4715 4 763 783.5599 MIKL 12335M001 3 698 554.3670 2 308 675.7981 4 639 769.3115 ESCO 13435M001 4 696 265.1645 79 978.2306 4 304 244.7445 LLIV 13436M001 4 709 586.4976 162 244.3480 4 285 914.0299
9.1. Ziemskie układy odniesienia wyznaczone za pomocą klasycznych technik pomiarowych
Powstanie zjednoczonej Polski po rozbiorach spowodowało koniecz-ność wprowadzenia jednolitego układu współrzędnych dla istniejących w trzech zaborach sieci geodezyjnych i map topograficznych. Zadanie to zre-alizował Wojskowy Instytut Geograficzny (WIG) wprowadzając układ od-niesienia „Borowa Góra” („BG”).
Układ odniesienia „Borowa Góra”
Układ „BG”, oficjalnie wprowadzony do użytku w 1936 roku, stanowił podstawę prowadzenia prac geodezyjnych i kartograficznych do 1952 r. (Ci-sak i Sas 2004). Powstał on w wyniku przyłożenia elipsoidy Bessela 1841 (a = 6 377 395 m, f = 1/299.152 813) do geoidy w Borowej Górze. Orientację zapewniał azymut astronomiczny na wieżę w Modlinie. Jako współrzędne geodezyjne tego punktu przyjęto wyznaczone z pomiarów astronomicznych:
φ = 52º28'32".85 λ = 21º02'12".12
Punkt przyłożenia tego układu znajduje się obecnie na terenie Obserwa-torium Geodezyjno-Geofizycznego Instytutu Geodezji i Kartografii w Boro-wej Górze. Jest on przykryty kopcem o wysokości około 8 m. Punkt ten, po-mimo historycznego znaczenia, posiada wyznaczone współrzędne geodezyjne w układzie „1965” oraz ITRF.
Współrzędne płaskie punktów sieci geodezyjnej zostały obliczone w odwzorowaniu Roussilhe’a zmodyfikowanym dla terenu Polski przez pro-fesora Grabowskiego z Politechniki Lwowskiej. Odwzorowanie to nazwano odwzorowaniem quasi-stereograficznym8 Wojskowego Instytutu Geograficz-nego. Oficerowie WIG Biernacki i Słomczyński w 1930 r. zastosowali je do opracowania map i współrzędnych punktów triangulacyjnych leżących na obszarze Polski. Punkt główny odwzorowania quasi-stereograficznego WIG obrano w punkcie o współrzędnych: φ = 52°N , λ = 22°E (Greenwich). W celu zminimalizowania zniekształceń na odwzorowywanym obszarze przyjęto współczynnik zniekształcenia skali m0 = 0.9995, co daje zerowe zniekształce-nia na elipsie zbliżonej do koła o promieniu około 284 km.
8 Odwzorowanie quasi-stereograficzne jest odwzorowaniem azymutalnym
wiernokątnym powierzchni elipsoidy (analogia do odwzorowanie stereograficznego powierzchni kuli). Orientacja przestrzenna realizowana jest przez podanie tzw. punktu głównego, który jest punktem styczności z elipsoidą odniesienia płaszczyzny równo-ległej do płaszczyzny odwzorowawczej. Rozkład zniekształceń liniowych na płasz-czyźnie odwzorowawczej, odwzorowania quasi-stereograficznego definiuje się przez podanie współczynnika zniekształcenia skali w punkcie głównym.
Wszystkie mapy wydawane w okresie międzywojennym przez WIG, a także przez niemiecki Sztab Generalny w czasie II wojny światowej (reprin-ty map polskich), zawierały nadruk siatki współrzędnych w układzie „Borowa Góra”.
Po II wojnie światowej w wyniku zmian terytorialnych kraju do jego części pokrytej przedwojenną osnową geodezyjną dołączona została część pokryta triangulacją niemiecką. Powstała w ten sposób osnowa geodezyjna była niejednorodna (różne elipsoidy odniesienia, różne punkty przyłożenia, różne wyrównania). Na bazie tej osnowy, bez przeprowadzenia ścisłego wy-równania, obliczono współrzędne geodezyjne punktów w odniesieniu do elip-soidy Bessela 1841 przyłożonej w Borowej Bórze. Współrzędne płaskie w układzie „BG” w odwzorowaniu Gaussa–Krügera zostały obliczone w sze-ściostopniowych pasach odwzorowczych. Początkowo przyjęto współczynnik zniekształcenia skali na południku osiowym m0 = 0.999 935, a od 1949 r. m0 = 1 (Różycki 1950). Dokładność wyznaczenia współrzędnych w tym ukła-dzie wynosi około 0.1 m (Cisak i Sas 2004). Terytorium Polski poukła-dzielono na dwie zasadnicze strefy odwzorowawcze: na wschód i na zachód od południka 18° (południki osiowe: 15° i 21°).
Układ odniesienia „1942”
W roku 1953, w wyniku unifikacji układów odniesienia państw należą-cych do Układu Warszawskiego, wprowadzono w Polsce układ odniesienia Pułkowo 1942. Układ ten obowiązywał dla celów gospodarczych do połowy lat sześćdziesiątych, a dla celów obronnych do początku lat dziewiędziesią-tych. Układ odniesienia Pułkowo 1942 powstał poprzez przyłożenie elipsoidy Krasowskiego (a = 6 378 245.000 00 m, f = 1/298.300 000) do geoidy w Pułkowie (φ = 59°46'18".55, λ = 30°19'42".0) z orientacją na punkt Bugary (Różycki 1950). Był to układ odniesienia przyjęty w byłym ZSRR w roku 1942 stąd też jego nazwa.
Z układem odniesienia „1942” związane są dwa sposoby odwzorowa-nia GaussaKrügera (Kadaj 1999a):
1) Dla map średnio- i małoskalowych (dla skal mniejszych od 1:5000) odwzorowanie w pasach południkowych o szerokości 6, w wyniku czego na obszarze Polski powstały dwie strefy odwzorowawcze: z po-łudnikami osiowymi 15 i 21, oznaczane również jako 1942/15 (6) i 1942/21 (6). Zniekształcenia odwzorowawcze zmieniały się od 0 na południku osiowym każdej strefy do około 59 cm/km na brzegach stre-fy.
2) Dla map wielkoskalowych (skale większe od 1:5000) stosowano od-wzorowanie w pasach południkowych o szerokości 3, w wyniku czego obszar Polski został podzielony na cztery strefy odwzorowawcze z po-łudnikami osiowymi 15, 18, 21 i 24, oznaczane również jako
1942/15 (3), 1942/18 (3), 1942/21 (3), 1942/24 (3). Zniekształcenia odwzorowawcze na brzegach stref dochodziły do 15 cm/km.
Rys. 1. Układ „1942” w pasach 6 i 3 stopniowych (Kadaj 1999a) Układ wpółrzędnych „1965”
Układ odniesienia „1942” był układem objętym klauzulą tajności. Sto-sowanie tego układu w pracach cywilnych było w związku z tym bardzo kło-potliwe, dlatego też w latach sześćdziesiątych państwowa służba geodezyjna rozpoczęła prace nad wprowadzeniem nowego, 5-strefowego układu odwzo-rowawczego, który nazwany został układem „1965”. Układ współrzędnych (płaskich) „1965” wprowadzony został do opracowań kartograficznych prze-znaczonych na potrzeby gospodarcze w 1968 r. Decyzja Prezydium Rządu z 1970 r. zobowiązywała do wymiany map wykonanych uprzednio w innych odwzorowaniach i układach odniesienia (np. mapy topograficzne w skali 1:10 000 do roku 1970 opracowywane były w układzie odniesienia „1942”) na mapy w układzie „1965” oraz wykonanie dla całego kraju prac kartogra-ficznych umożliwiających udostępnienie map użytkownikom. Zgodnie z roz-porządzeniem Prezesa Rady Ministrów z dnia 8 sierpnia 2000 r. w sprawie państwowego systemu odniesień przestrzennych, układ „1965” oraz lokalne układy współrzędnych mogą być stosowane do dnia 31 grudnia 2009 r. Pod-stawę układu „1965” stanowił ten sam, co w systemie „1942” układ współ-rzędnych elipsoidalnych. Obszar Polski podzielono na 5 stref odwzorowaw-czych, przy czym w strefach 1, 2, 3, 4 zastosowano tzw. odwzorowanie quasi-stereograficzne Roussilhe’a, natomiast w strefie 5 zmodyfikowane odwzoro-wanie GaussaKrügera (Kadaj 1999a). Strefy odwzorowawcze w układzie „1965” przedstawione są na mapie (rys. 2) (GUGiK 2000a).
Zniekształcenia odwzorowawcze w każdej strefie układu mieszczą się w zakresie od 20 cm/km do 20 cm/km. Układ „1965” był przeznaczony głównie do tworzenia mapy zasadniczej.
Rys. 2. Podział obszaru Polski na strefy układu „1965” (Kadaj 1999a)
Dla map topograficznych i przeglądowych w skalach 1:100 000 i mniejszych przyjęto układ oparty na jednostrefowym odwzorowaniu quasi-stereograficznym obszaru Polski, nazwany „GUGiK80”. Punkt główny od-wzorowania był umiejscowiony w geometrycznym „środku” Polski (φ0 = 5210', λ0 = 1910'). Współczynnik zniekształcenia skali w tym punkcie wynosi m0 = 0.999 714, a maksymalne zniekształcenie liniowe na granicach Polski wynosi 93 cm/km. Układ ten znalazł zastosowanie jedynie przy opra-cowaniu wydawanej w latach 1980–1984 topograficznej mapy Polski w skali 1:100 000.
Rys. 3. Układ współrzędnych „GUGiK80” (odwzorowanie quasi-stereograficzne) (Kadaj 1999a)
9.2. Ziemskie układy odniesienia wyznaczone za pomocą satelitarnych i kosmicznych technik pomiarowych
W końcu lat dziewięćdziesiątych powstała techniczna możliwość mo-dernizacji państwowego systemu odniesień przestrzennych poprzez wykorzy-stanie obserwacji satelitarnych. Wyrazem tego był udział w kampaniach WEDOC stacji położonych w Polsce oraz założenie Krajowej Sieci Dopple-rowskiej (Śledziński i in. 1988). Prace te kontynuowano na początku lat dzie-więćdziesiątych pod kątem włączenia polskich punktów do sieci stacji euro-pejskich definiujących ETRS, wiążący te punkty ze międzynarodowego ziem-skiego systemu odniesienia ITRS. Na wniosek Głównego Geodety Kraju, dr. Remigiusza Piotrowskiego, powołany został przez Sekcję Sieci Geodezyj-nych Komitetu Geodezji PAN zespół pod przewodnictwem prof. Lubomira W. Barana, który opracował raport „O potrzebie i zasadach założenia zinte-growanej podstawowej sieci geodezyjnej w układzie EUREF” (Baran i in. 1991). Zaproponowano sieć składającą się z 11 punktów, przy których dobo-rze, poza warunkami geometrycznymi obowiązującymi dla sieci EUREF, uwzględniono również ich przynależność do istniejących lub projektowanych sieci:
Krajowej Sieci Dopplerowskiej (KSD), założonej w 1986 roku, Jednolitej Sieci Astronomiczno-Geodezyjnej (JSAG),
International GPS Service for Geodynamics (IGS), Baltic Sea Level Project (BSLP),
realizowanych od szeregu lat krajowych sieci geodynamicznych. Po konsultacjach w środowisku geodezyjnym raport został zaakcepto-wany jako projekt nowej osnowy EUREF w Polsce, która miałaby stanowić również sieć „zerowego” rzędu, realizującą nowy układ odniesienia. Nowe punkty, ze względu na jawność ich współrzędnych, nie pokrywały się z istnie-jącą osnową państwową. Uznano natomiast za wskazane, tam gdzie było to możliwe, wykonanie stabilizacji nad płytami punktów sieci KSD. Stabilizację wykonano w postaci postumentu betonowego o wysokości około 100 cm nad poziomem gruntu z wymuszonym centrowaniem.
W roku 1992 utworzono na obszarze Polski najpierw sieć EUREF- -POL, złożoną z 11 punktów bazowych, którą następnie zagęszczono siecią około 350 punktów, zwaną w skrócie POLREF. Współrzędne punktów sieci EUREF-POL i sieci EUREF zostały wyznaczone przy użyciu obserwacji GPS. Sieci EUREF-POL i POLREF stały się z kolei podstawą ponownego wyrównania dawnej sieci astronomiczno-geodezyjnej i triangulacji wypełnia-jącej (sieci I klasy), a następnie także sieci poziomej II klasy. Wszystkie obli-czenia wykonano już na nowej elipsoidzie GRS80 systemu ETRS. Zdefinio-wany w ten sposób układ odniesienia stanowi podstawę wprowadzenia no-wych układów współrzędnych płaskich: „1992”, „2000” (Baran i in. 1993).
Równolegle z pracami cywilnej służby geodezyjnej nad zmianą układu odniesienia trwały prace służb wojskowych, które zobowiązane były do do-stosowania polskich norm do standardów NATO. Pierwszą decyzją służącą realizacji tych zadań było zaprojektowanie i pomiar sieci WPSG (56 punk-tów). Pomiar sieci został wykonany przy współudziale wojskowej służby topograficznej Stanów Zjednoczonych. Następnie w trzech kolejnych kampa-niach sieć tę zagęszczono siecią WSSG o liczbie około 600 punktów, jedno-rodnie rozmieszczonych na terenie Polski. Sieci WSSG i POLREF zostały wyrównane niezależnie, niestety, przyjęto również skrajnie różne strategie opracowania i nawiązania wspomnianych sieci. Sieć WSSG została nawiąza-na do istniejącego w Europie systemu stacji permanentnych EUREF, a sieć POLREF do punktów sieci EUREF-POL. W ten sposób różnice na punktach wspólnych sieci dochodziły nawet do 10 cm. W 1999 r. na podstawie poro-zumienia podpisanego przez Głównego Geodetę Kraju i Szefa Wojskowej Służby Topograficznej wydano decyzję o wspólnym wyrównaniu sieci POLREF i WSSG. Wspólne wyrównanie sieci nie było jednak możliwe bez powtórnego przeliczenia całej sieci POLREF. Powodem tego było niezarchi-wizowanie równań normalnych z pierwotnego wyrównania. Powtórnego wy-równania nie brano pod uwagę, dlatego postanowiono, aby wpasować układ realizowany przez sieć WSSG w sieć POLREF, za pomocą transformacji Helmerta, wykorzystując do tego celu 26 punktów wspólnych. Zdefiniowany w ten sposób układ odniesienia stanowi podstawę wprowadzonego na terenie Polski dla celów wojskowych układu współrzędnych płaskich „UTM”.
Pomimo wykorzystania techniki satelitarnej GPS, założona techniką GPS (POLREF) osnowa podstawowa kraju, podobnie jak zakładane techni-kami „klasycznymi”, ma charakter statyczny, nie ma możliwości kontroli zmian współrzędnych punktów w funkcji czasu. Problem częściowo pozwoli-ły rozwiązać powstające w Polsce stacje permanentne GNSS, na których pro-wadzone są w ramach programów międzynarodowych (IGS/EUREF) ciągłe pozycyjne obserwacje satelitarne służące do dowiązania wyników obserwacji wykonywanych w aktualnym globalnym systemie odniesienia do państwowe-go systemu odniesień przestrzennych. Na terenie Polski w pierwszej połowie lat dziewięćdziesiątych powstały chronologicznie trzy stacje IGS: w Józefo-sławiu, Borowcu i Lamkówku.
Obecniej działa w Polsce, w ramach sieci IGS/EUREF, 8 stacji perma-nentnych GPS (rys. 4). Oprócz wymienionych wyżej trzech stacji IGS do podsieci IGS – EPN włączonych jest 5 polskich stacji: Borowa Góra, Wro-cław, Kraków, Katowice i Żywiec, służących do monitorowania europejskie-go układu odniesienia ETRF. Na niektórych ze wspomnianych stacji utrzy-mywane są również inne służby permanentne, takie jak: laser satelitarny SLR, grawimetryczna służba pływowa, służba czasu, pomiary astrome-tryczne, meteorologiczne, służba stanu jonosfery i troposfery. Sieć stacji per-manentnych GPS działających w Polsce wzbogacona jest siecią stacji Polskiej Aktywnej Sieci Geodezyjnej (ASG PL), powołanej na podstawie
porozumie-nia pomiędzy Głównym Geodetą Kraju a Marszałkiem Województwa Ślą-skiego. Sieć stacji permanentnych GPS współpracujących z ASG PL przed-stawiono na rysunku 5 (http://www.asg-pl.pl/).
Rys. 4. Sieć stacji permanentnych EUREF/IGS w Polsce
Układ wpółrzędnych „1992”
Państwowy układ płaskich współrzędnych prostokątnych, stanowiący część państwowego systemu odniesień przestrzennych, wprowadzony został, podobnie jak opisany dalej układ „2000”, rozporządzeniem Rady Ministrów z 8 sierpnia 2000 r. Układ „1992” jest jednostrefowym, dla obszaru Polski, odwzorowaniem GaussaKrügera z południkiem osiowym λ0 = 19 i współ-czynnikiem zmiany skali m0 = 0.9993 (Balcerzak 1994). To ostatnie założenie ma na celu uzyskanie równomiernego rozkładu zniekształceń liniowych, od 70 cm/km na południku osiowym do około 90 cm/km w skrajnych, wschod-nich obszarach Polski (rys. 6) (Balcerzak 1995). Układ został nazwany ukła-dem „1992”. Obecnie stanowi podstawę wykonywania nowych map w ska-lach 1:10 000 i mniejszych. Ze względu na znaczne zniekształcenia liniowe układ ten nie został rekomendowany do wielkoskalowych opracowań karto-graficznych.
Rys. 6. Układ „1992” (jednostrefowe odwzorowanie GaussaKrügera).
Rysunek prawy prezentuje rozkład zniekształceń odwzorowawczych [cm] (Kadaj 1999a)
Układ współrzędnych „2000”
Układ „2000” jest czterostrefowym odwzorowaniem GaussaKrügera elipsoidy GRS80, w pasach 3-stopniowych. Dla obszaru Polski wyodrębniono cztery trzystopniowe strefy południkowe o południkach osiowych, których długości geodezyjne wschodnie wynoszą 15°, 18°, 21° i 24°. Dla każdej z tych stref współczynnik m0 zniekształcenia skali na południku osiowym wynosi 0.999 923, a zniekształcenia liniowe zawierają się w zakresie od
7.7 cm/km na południku osiowym do około +7 cm/km na brzegu każdej strefy (GUGiK 2000a, 2000b).
Rys. 7. Układ „2000” (wielostrefowe odwzorowanie GaussaKrügera)
(Kadaj 1999c)
Układ współrzędnych „UTM”
Poprzeczne odwzorowanie Mercatora (Transverse Mercator Projection, TM) znane również pod nazwą wiernokątnego odwzorowania Gaussa lub odwzorowania GaussaKrügera (van Gysen 1992), jest walcowym, poprzecz-nym, stycznym (tj. współczynnik zniekształcenia skali na południku osiowym m0 = 1), wiernokątnym odwzorowaniem elipsoidy. Do typowych wymiarów pasów odwzorowaczych używanych w odwzorowaniu TM zalicza się pasy 2, 3, 4 i 6. Modyfikacją odwzorowania TM jest uniwersalne poprzeczne od-wzorowanie Mercatora (Universal Transverse Mercator Projection, UTM) stosowane na świecie do celów wojskowych i nawigacyjnych od II wojny światowej. Odwzorowanie to jest używane przez wszystkie państwa człon-kowskie NATO. Walec eliptyczny, na którego powierzchnię odwzorowywany jest obraz powierzchni elipsoidy, nie jest w wypadku „UTM” styczny do soidy wzdłuż południka osiowego pasa odwzorowawczego; przecina on elip-soidę w taki sposób, że wzdłuż południka osiowego powstaje stałe zniekształ-cenie skali m0 = 0.9996, co odpowiada zniekształceniu liniowemu na południ-ku osiowym 40 cm/km. „UTM” należy zatem do grupy odwzorowań siecz-nych elipsoidy. W „UTM” stosowane są wyłącznie sześciostopniowe pasy odwzorowawcze, którym przypisane są numery wzrastające z zachodu na wschód od 1 do 60, przy czym pas odwzorowaczy o numerze 1 odpowiada
strefie odwzorowawczej pomiędzy południkami 180 i 186 (Snyder 1987). Obszar Polski odwzorowuje się w pasach o numerach 33 i 34. Odwzorowanie „UTM” zostało wprowadzone pierwotnie na elipsoidzie Hayforda, obecnie zaś w zastosowaniach cywilnych i wojskowych obowiązuje elipsoida WGS84. W Polsce odwzorowanie TM przyjęło się, że nazywać odwzorowa-niem GaussaKrügera. Sieczne, z wyspecyfikowanym współczynnikiem zniekształcenia skali m0 ≠ 1, walcowe, poprzeczne, wiernokątne odwzorowa-nie elipsoidy nazywane jest w Polsce rówodwzorowa-nież odwzorowaodwzorowa-niem Gaus-saKrügera lub „zmodyfikowanym odwzorowaniem GausGaus-saKrügera”.
Transformacja współrzędnych pomiędzy układem ETRF89 i układem „1942”
Siedmioparametrową transformację pomiędzy współrzędnymi karte-zjańskimi w układach ETRF89 i „1942” można zrealizować, stosując podane niżej wzory (Kadaj 1999a):
dZ dY dX Z Y X e e e e e e s Z Y X ETRF X Y X Z Y Z 89 1942 0 0 0 1 1 1 ) 1 ( (7) gdzie: dX = –33.429 70 m, dY = 146.574 76 m, dZ = 76.286 90 m, s = 0.847 52 ppm, eX = –0.358 672/ρ", eY = –0.052 836/ρ", eZ = 0.843 544/ρ".
Wykonanie powyższej transformacji daje w wyniku współrzędne geo-centryczne odniesione do początku układu „1942”. Transformacja do układu „1965” jest bardziej skomplikowana; jej opis został zamieszczony w instruk-cji G-2 (GUGiK 2000b).
9. PODSUMOWANIE
Historia ziemskiego systemu odniesienia liczy już ponad 100 lat (1900–2004). W tym okresie nastąpił ogromny wzrost dokładności ziemskie-go układu odniesienia (od ±0.5 m do ±0.003 m). Nastąpił też istotny wzrost dokładności transformacji pomiędzy niebieskim i ziemskim układem odnie-sienia (obecnie ICRF i ITRF). Wzrost dokładności tej transformacji wynika z wprowadzania coraz dokładniejszych modeli precesji i nutacji oraz poprawy dokładności wyznaczeń parametrów ruchu obrotowego Ziemi (EOP). W tym czasie poprawiła się w istotny sposób dokładność modeli deformacji. Nowe systemy odniesienia wraz z dokładnie określonymi wzajemnymi relacjami stwarzają możliwość pełnego wykorzystania globalnych systemów satelitar-nych i technik kosmiczsatelitar-nych, zarówno do dalszych badań dynamiki Ziemi jako
planety, jak i rozwiązywania praktycznych zadań z zakresu nawigacji oraz geodezji.
PODZIĘKOWANIA
Niniejszą pracę wykonano w ramach badań statutowych Instytutu Geo-dezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej. Autorzy opracowania dziękują panu prof. dr. hab. Janowi Kryńskiemu za wiele cen-nych uwag merytoryczcen-nych i pomoc przy redagowaniu pracy oraz kolegom mgr inż. Magdalenie Kłęk i mgr. inż. Wiesławowi Kurce z Zespołu Astrono-mii Geodezyjnej za pomoc przy jej opracowaniu.
BIBLIOGRAFIA
Balcerzak J., 1994, Odwzorowanie Gaussa-Krügera w szerokiej 12º strefie dla obszaru Polski, IX Szkoła Kartograficzna, Komorowo, 1014 paź-dziernika 1994.
Barcerzak J., 1995, Państwowy układ współrzędnych 1992, Główny Geodeta Kraju (mat. do użytku służbowego), Warszawa.
Balcerzak J., 1997, Projective reductions in the Roussilhe projection, Ge-odezja i Kartografia, t. XLVI, z. 4, 1997, pp. 254261.
Baran L.W., Śledziński J., Barlik M., Czarnecki K., Dobrzycka M., Gajdero-wicz I., Oszczak S., Pachelski W., Rogowski J.B., Cisak J., 1991, Ra-port o potrzebie i zasadach założenia zintegrowanej podstawowej sieci geodezyjnej Polski w układzie EUREF, Raport dla Głównemgo Geode-ty Kraju, Warszawa.
Baran L.W., Barlik M., Czarnecki K., Gelo S., Krajewski W., Nowak E., Oszczak S., Pachelski W., Rogowski J.B., Sas-Uhrynowski A., Śledziń-ski J., Trysła A., ZielińŚledziń-ski J.B., Grygorenko W., MakowŚledziń-ski A., Pana-siuk J., Balcerzak J., 1993, Ekspertyza dotycząca podstawowych zało-żeń nowego państwowego systemu współrzędnych geodezyjnych w Pol-sce,. Raport dla Głównego Geodety Kraju, Warszawa..
Bosy B., Figurski M., 2003, Problematyka opracowania obserwacji satelitar-nych GPS w precyzyjsatelitar-nych sieciach lokalsatelitar-nych, Wydawnictwo Akademii Rolniczej, Wrocław.
Boucher C., Altamimi Z., 2001, Memo: Specifications for Reference Frame Fixing in the Analysis of a EUREF GPS Campaign, (http://www.epncb. oma.be/papers.html).
Cisak M., Sas A., 2004, Transformacja współrzędnych punktów z układu „Borowa Góra” do układu „1942”, Prace IGiK, Warszawa (w druku). Dadlez R., Jaroszewski W., 1994, Tektonika, Wydawnictwo Naukowe PWN,
DMA, 1991, Department of Defense World Geodetic System 1984. Its Defini-tion and RelaDefini-tionships with Local Geodetic Systems, U. S. Defense Mapping Agency DMA TR 8350.2, Second Edition, 1 September 1991. EUROCONTROL, 1995, WGS84 Implementation Training Course, Brussels,
Belgium, held at INSTILUX/Luxembourg on 31.1-3.2 1995, prepared by the Institute of Geodesy and Navigation, University FAF Munich, Germany.
Figurski M., 2002, Propozycje standaryzacji opracowania precyzyjnych sieci GPS, Seminarium „Satelitarne metody wyznaczania pozycji we współ-czesnej Geodezji i Nawigacji”, 1617 września 2002, Warszawa Józefosław.
GEONET, 1997, GEONET_unitrans: uniwersalny program transformacji współrzędnych pomiędzy różnymi układami w obszarze Polski oraz programy pomocnicze, opis pakietu, I wyd., 1977, n. ed. 2000, ALGORES-SOFT s.c. Rzeszów.
Gordon R.G., Stein S., de Mets Ch., Argus D.F., 1987, Statistical Test for Closure of Plate Motion Circiuts, Geophys. Res. Lett., Vol. 14, No 6, pp. 587590.
GUGIK, 2000a, Wytyczne Techniczne G-1.10 (nowa edycja), Załącznik na CD-R: Program TRANSPOL, Główny Geodeta Kraju, GUGiK, War-szawa.
GUGIK, 2000b, Instrukcja Techniczna G-2 (nowe wydanie), GUGIK, War-szawa.
van Gysen H., 1992, Coordinate systems and map projections for GIS, Pre-sented at the GIS conference in Pretoria, South Africa, April.
Heiskanen W.A., Moritz H., 1966, Physical Geodesy, Freeman and Company, San Francisco–London.
Hofmann-Wellenhof B., Lichtenegger H., Collins J., 1997, Global Positioning System Theory and Practice, Springer-Verlag, Wien-New York.
IERS, 1993, IERS-1992, Annual Report, International Earth Rotation Service (IERS), Observatoire de Paris, July.
IERS96, 2000, The 1996 IERS Conventions Homepage: the Chapters, Subrou-tines, and Associated Information, http://maia.usno.navy.mil/ conventions.html.
Kadaj R., 1999a, Formuły odwzorowawcze i parametry układów współrzęd-nych, Wytyczne Techniczne G-1.10, GUGiK, Warszawa, grudzień. Kadaj R., 1999b, Procedury transformacji pomiędzy państwowymi układami
współrzędnych, Opis procedur bazy GEOS w CODGiK, GEOMAT sp. z o.o. w Poznaniu, wrzesień.
Kadaj R., 1999c, Układ Kartograficzny PUK2000 (projekt wdrożeniowy), INFOPRO s.a. Przedsiębiorstwo Projektowo-Wdrożeniowe, Warszawa, sierpień.
Kryński J., Rogowski J.B., 2004, Systemy i układy odniesienia w geodezji, geodynamice i astronomii, Monographic series of the Institute of Geo-desy and Cartography, Nr 10, Warsaw 2004, pp. 11–35 (this issue). Melbourne W., Anderle R., Feissel M. i inni, 1983, Project MERIT Standards,
USNO Circular No 167, Washington D.C.
de Mets C., Gordon R.G., Argus D.F., Stein S., 1990, Current plate motion, Geophys. J. Int., 101, pp. 425478.
de Mets C. i inni, 1994, Effect of recent revisions to the geomagnetic reversal time scale on estimates of current plate motions, Geophys. Res. Lett., Vol. 21 No 20, pp. 2191-2194.
Mueller I.I., 1969, Spherical and Practical Astronomy as Applied to Geodesy, Frederick Ungar Publishing Co., New York.
Różycki J., 1950, Odwzorowanie Gaussa – Krügera i jego zastosowania w Polsce, Wyd. 2 zmienione , Prace GINB, Warszawa 1950.
Sandwell D.T., 2001, Geodynamics: Marine Magnetic Anomalies, Lecture Notes SIO 234, http://topex.ucsd.edu/geodynamics
Seeger H., 1993, EUREF – A modern Geodetic Approach to Establish an All-European Reference System, Belgo-All-European Seminar “New Survey-ors”, Wegimont, 2425 March.
Snyder J.P., 1987, Map projections – a working Manual, U.S. Geological Survey Professional Paper 1395, U.S. Government Printing Office, Washington.
Śledziński J., Rogowski J.B., Jakś W., 1988, Krajowa Sieć Dopplerowska, Materiały IV Sympozjum Komitetu Geodezji PAN „Współczesne pro-blemy podstawowych sieci geodezyjnych”, Warszawa, pp. 133142.
![Tablica 5. Wartości parametrów transformacji pomiędzy układami ITRFyy i ETRF ITRFyy T x [cm] T y [cm] T z [cm] x [mas/rok] y [mas/rok] z [mas/rok] 89 0 0 0 0.110 0.570 0.710 90 1.9 2.8 2.3 0.110 0.570 0.710 91 2.1 2.5 3.7](https://thumb-eu.123doks.com/thumbv2/9liborg/3155599.10968/16.892.207.689.262.1059/tablica-wartości-parametrów-transformacji-pomiędzy-układami-itrfyy-itrfyy.webp)
![Tablica 6. Współrzędne stacji permanentnych sieci WUT-EPN wyrażone w układzie ETRF89 Stacja X [m] Y [m] Z [m] BUCU 11401M001 4 093 761.2026 2 007 793.5699 4 445 129.7621 POLV 12336M001 3 411 557.7345 2 348 463.7961 4 834 396.7109 BOGI 1](https://thumb-eu.123doks.com/thumbv2/9liborg/3155599.10968/18.892.189.705.227.1026/tablica-współrzędne-stacji-permanentnych-sieci-wyrażone-układzie-stacja.webp)
![Rysunek prawy prezentuje rozkład zniekształceń odwzorowawczych [cm]](https://thumb-eu.123doks.com/thumbv2/9liborg/3155599.10968/26.892.169.716.246.1138/rysunek-prawy-prezentuje-rozkład-zniekształceń-odwzorowawczych-cm.webp)
