Dynamika i Stateczność
1 |
S t r o n a
dr inż. Hanna Weber
2L
L
0,5L
EJ
EJ
EJ
S
S
S
S
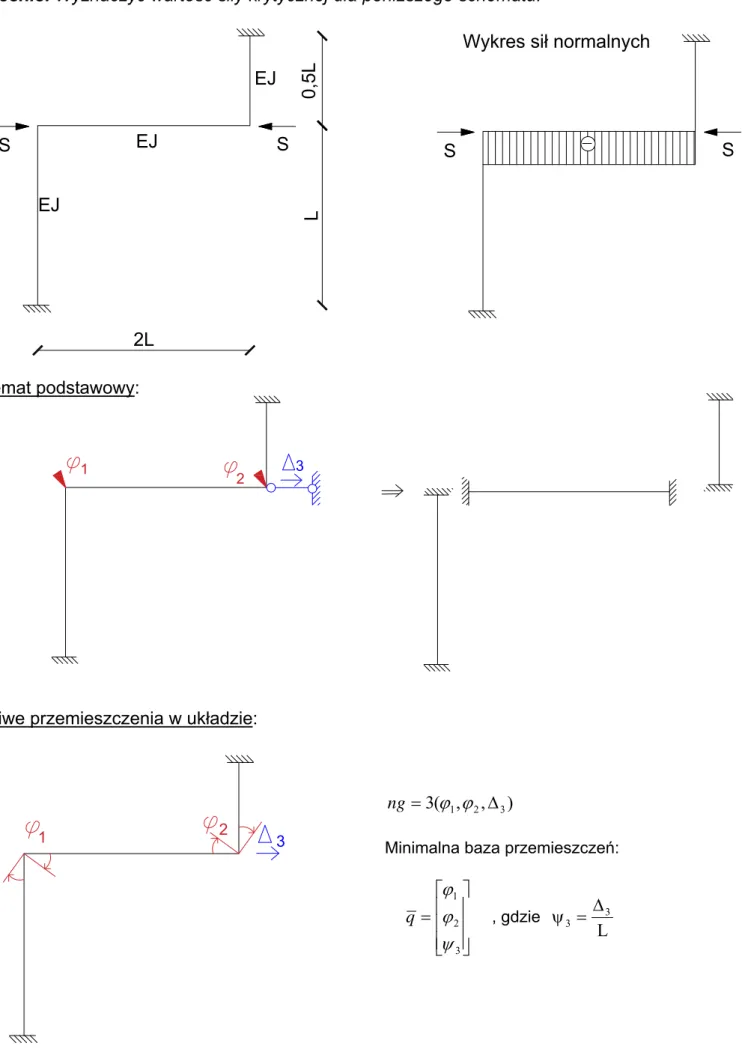
Wykres sił normalnych
1 2 3
1 2 3
Stateczność
Polecenie:
Wyznaczyć wartość siły krytycznej dla poniższego schematu:
Schemat podstawowy:
Możliwe przemieszczenia w układzie:
)
,
,
(
3
1 2
3
ng
Minimalna baza przemieszczeń:
3 2 1
q , gdzieL
3 3
Dynamika i Stateczność
2 |
S t r o n a
dr inż. Hanna Weber
x
2y
22
1 12 2 21x
1y
11
x
3y
33
1 100
1
2
3
3 10L
-2
3 230,5L
2
L
3 3 3 3 3 2 23Rozbicie układu na elementy:
Wektory przemieszczeń końców elementów:
10 10 1 0 q 10 10 1 q
)
3
(
)
2
(
0 q 21 12 2 21 12 2 q)
2
(
)
1
(
23 23 3 0 q 23 23 3 q)
3
(
)
1
(
Zbiorczy wektor przemieszczeń:
3 2 1 A 23 23 21 12 10 10 3 2 1 A x 2 0 0 0 1 0 0 1 0 0 0 1 1 0 0 0 0 1 q q q q
Macierze sztywności elementów:
12
6
6
4
L
EI
K
K
* 1e 1Dynamika i Stateczność
3 |
S t r o n a
dr inż. Hanna Weber
4
1
1
4
EI
15
L
S
2
1
1
2
L
EI
4
1
1
4
30
L
2
S
2
1
1
2
L
EI
15
2
30
1
30
1
15
2
L
2
S
4
2
2
4
L
2
EI
K
K
K
2 G 2 e 2 * 2
4
2
1
1
4
2
L
EI
K
EI
15
L
S
* 2 2 Założenie
24
12
12
8
L
EI
12
6
6
4
L
EI
2
12
6
6
4
L
5
,
0
EI
K
K
* 3e 3Zbiorcza macierz sztywności:
24
12
0
0
0
0
12
8
0
0
0
0
0
0
4
2
1
0
0
0
0
1
4
2
0
0
0
0
0
0
12
6
0
0
0
0
6
4
L
EI
K
0
0
0
K
0
0
0
K
L
EI
K
* 3 * 2 * 1 * AWyznaczenie macierzy sztywności układu:
108 24 6 24 4 10 1 6 1 4 6 L EI 2 0 0 0 1 0 0 1 0 0 0 1 1 0 0 0 0 1 48 24 0 0 12 6 12 8 4 2 1 0 0 0 0 1 4 2 6 4 L EI 2 0 0 0 1 0 0 1 0 0 0 1 1 0 0 0 0 1 24 12 0 0 0 0 12 8 0 0 0 0 0 0 4 2 1 0 0 0 0 1 4 2 0 0 0 0 0 0 12 6 0 0 0 0 6 4 L EI 2 0 0 0 1 0 0 1 1 0 0 0 0 0 0 1 0 1 A K A K * A T *
Wyznaczenie współczynnika wyboczeniowego:
0
K
0
q
Dynamika i Stateczność
4 |
S t r o n a
dr inż. Hanna Weber 2 2 2 . min . kryt 2
L
EI
37
,
8
L
EI
15
558
,
0
L
EI
15
S
EI
15
L
S
Wyznacznik z macierzy sztywności - otrzymanie wielomianu:
0 2268 4968 1620 108 24 6 24 4 10 1 6 1 4 6 K* 2 Pierwiastki wielomianu: 558 , 0 509 , 2 558 , 0 . min 2 1