Analiza jakościowa równania
opisującego ruch płaski
wahadła matematycznego
Autorzy:
Vsevolod Vladimirov
(1)
(2)
(3)
Analiza jakościowa równania opisującego ruch płaski wahadła matematycznego
Analiza jakościowa równania opisującego ruch płaski wahadła matematycznego
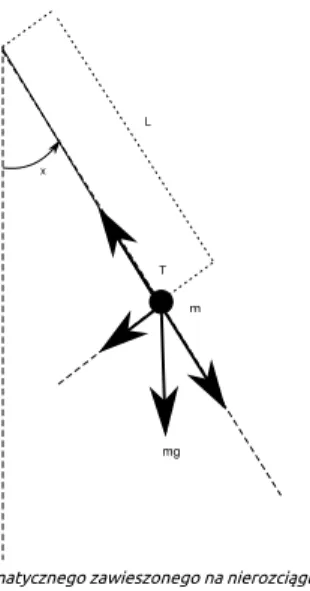
Autor: Vsevolod VladimirovRozpatrzmy model opisujący ruch płaski (czyli dwuwymiarowy) punktu materialnego o masie podwieszonego na nierozciągliwej nici długości w polu grawitacyjnym. Model fizyczny przedstawiony jest na Rys. 1.
mg
T L
m x
Rysunek 1: Model wahadła matematycznego zawieszonego na nierozciągliwej nici w polu grawitacyjnym
Na punkt materialny działa siła grawitacyjna skierowana w dół oraz siła naciągu nici , która w każdej chwili rekompensuje współrzędną podłużną siły grawitacji (warunek nierozciągliwości nici). Siłą wypadkową działającą na punkt materialny jest wówczas składowa poprzeczna siły grawitacji, wynosząca , gdzie oznacza kąt odchylenia nici od pionu. Punkt materialny porusza się wzdłuż okręgu o promieniu ; jego prędkość i przyspieszenie wynoszą odpowiednio i
. Zgodnie z Zasady dynamiki Newtona-Druga zasada dynamiki Newtona, równanie ruchu ma postać
Znak minus w prawej stronie wzoru odzwierciedla to, że siła poprzeczna, skierowana ku położeniu równowagi wahadła przeciwdziała wzrostowi kąta odchylenia.
Napiszmy równanie ruchu w postaci:
W przypadku gdy (relacja oznacza, że wartość bezwzględna jest znacznie mniejsza od jedynki), można zastąpić funkcją . Wówczas otrzymamy dobrze znane równanie liniowe, opisujące małe drgania punktu wokół położenia równowagi:
Ogólne rozwiązanie równania ( 2 ) dane jest wzorem . Poniżej przedstawiamy analizę zbioru rozwiazań równania ( 1 ). Ponieważ rozwiązań tych nie można opisać dokładnie poprzez funkcje elementarne, do ich analizy stosuje się metody jakościowe.
Napiszmy równanie ( 1 ) w postaci równoważnego układu równań rzędu pierwszego:
m,
L,
= m ⋅ g
F
grT
m ⋅ g ⋅ sin x
x
L
L (t)
x˙
L (t)
x¨
m ⋅ L ⋅
d2x= −m ⋅ g ⋅ sin x.
d t2+
sin x = 0,
ω =
.
x d2 d t2ω
2√
− −
g/L
−
|x| << 1
|x| << 1
x
sin x
x
+ x = 0,
ω =
.
x d2 d t2ω
2√
− −
g/L
−
x(t) = A sin (ωt + ϕ)
= −y,
d x d t=
sin x.
d y d tω
2(4)
LEMAT
Lemat 1:
Lemat 1:
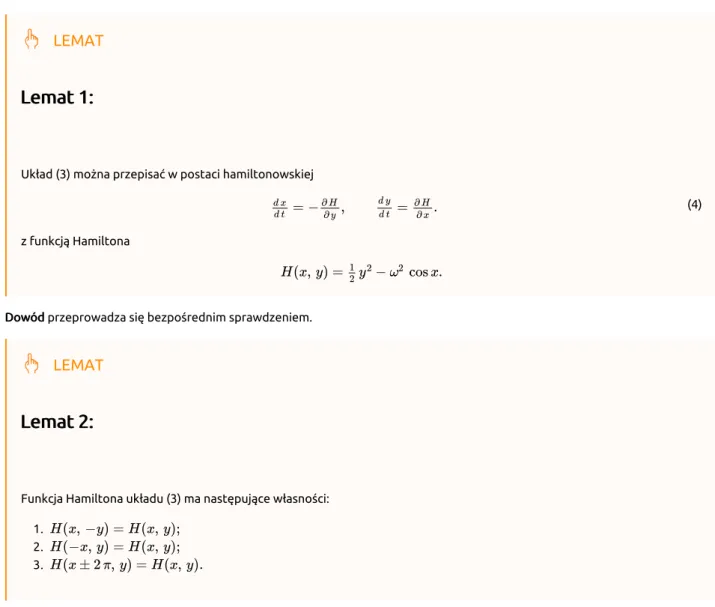
Układ (3) można przepisać w postaci hamiltonowskiej
z funkcją Hamiltona
Dowód
Dowód przeprowadza się bezpośrednim sprawdzeniem.
LEMAT
Lemat 2:
Lemat 2:
Funkcja Hamiltona układu (3) ma następujące własności: 1.
2. 3.
Dowód
Dowód wynika z niezmienniczości funkcji Hamiltona względem odbić oraz okresowości funkcji . Przypomnijmy sobie, że każdą trajektorię fazową układu hamiltonowskiego można przedstawić w postaci przy pewnej stałej . Trajektorie układu (3) są symetryczne względem odbić od obu osi współrzędnych. Ponadto, na mocy trzeciej własności funkcji , wystarczy przeanalizować przebieg trajektorii fazowych na odcinku i dalej przedłużyć je na kolejne sąsiadujące ze sobą odcinki krotności .
Wszystkie punkty stacjonarne układu (3) leżą na osi poziomej. Współrzędna punktu stacjonarnego należy do zbioru
. Typy poszczególnych punktów stacjonarnych określa zachowanie funkcji
opisującej energię potencjalną układu. Z wykresu tej funkcji, przedstawionego na Rys. 2 odczytujemy że punkty stacjonarne o współrzędnych są środkami, wtedy gdy punkty stacjonarne o współrzędnych są siodłami.
- 4 - 2 2 4 x - 1.0 - 0.5 0.5 1.0 V
Rysunek 2: Wykres energii potencjalnej . Poziomicom niebieskiego koloru odpowiadają rozwiązania okresowe; poziomicy czerwonego koloru - trajektorie heterokliniczne łączące ze sobą punkty siodłowe ; poziomicy leżącej powyżej wykresu funkcji odpowiada ruch nieograniczony.
Fragment portretu fazowego układu (3) jest przedstawiony na .
= −
,
=
.
d x d t ∂ H∂ y d yd t ∂ H∂ xH(x, y) =
1−
cos x.
2y
2ω
2H(x, −y) = H(x, y);
H(−x, y) = H(x, y);
H(x ± 2 π, y) = H(x, y).
x → −x, y → −y
cosx
H(x, y) = C,
C
H
(−π, π)
2 π
x
{0, ±π, ±2 π, . . . , ± kπ, . . . } {0, ±π, ±2 π, . . . , ± kπ, . . . } , k ∈ N
V (x) = − cos x,
ω
2(±2 kπ, 0)
(±(2 k + 1) π, 0)
V(x) = − cos xω2 (± π, 0) V(x)- 10 - 5 5 10 x - 2 - 1 1 2 y
Rysunek 3: Portret fazowy układu (3)
Fragmenty, nie pokazane na przedstawionym rysunku, uzyskuje się przeniesieniem portretu odpowiadającego odcinkowi o w lewo i w prawo. Zauważmy że trajektoriom zamkniętym (oznaczonym kolorem niebieskim) odpowiadają nieliniowe rozwiązania okresowe, trajektoriom łączącym siodła (oznaczonym kolorem czerwonym) - rozwiązania heterokliniczneheterokliniczne, trajektoriom leżacym poniżej lub powyżej heteroklinik (oznaczonym kolorem zielonym) - rozwiazania nieograniczone względem współrzędnej .
Publikacja udostępniona jest na licencji Creative Commons Uznanie autorstwa - Na tych samych warunkach 3.0 Polska. Pewne prawa zastrzeżone na rzecz autorów i Akademii Górniczo-Hutniczej. Zezwala się na dowolne wykorzystanie treści publikacji pod warunkiem wskazania autorów i Akademii Górniczo-Hutniczej jako autorów oraz podania informacji o licencji tak długo, jak tylko na utwory zależne będzie udzielana taka sama licencja. Pełny tekst licencji dostępny na stronie
http://creativecommons.org/licenses/by-sa/3.0/pl/.
Data generacji dokumentu: 2019-04-15 07:31:59
Oryginalny dokument dostępny pod adresem: https://epodreczniki.open.agh.edu.pl/openagh-permalink.php? link=2c9b5d09f3b8e5dba181c2c722dc6706
Autor: Vsevolod Vladimirov