Wyznaczanie przemieszcze
ń
w kratownicy
∑
∫
=
⋅
⋅
=
⋅
=
n
P
P
P
P
p
P
L
E
A
N
L
N
dL
EA
N
N
1
δ
Całkujemy siły normalne na poszczególnych pr
ę
tach
Zadanie: Wyznacz przemieszczenie pionowe w
ę
zła A
z zasady prac wirtualnych, EA=const
3
18kN
16kN
A
4
3
Wyznaczenie reakcji
3
V =4kN
1H =18kN
11
2
V =20kN
218kN
16kN
A
4
3
Wyznaczenie sił w pr
ę
tach od obci
ąż
enia zewn
ę
trznego
18kN
16kN
A
4
3
3
V =4kN
1H =18kN
11
2
V =20kN
23
4
D
1D
2G
1S
1K
1S
2K
2Wykres sił normalnych w kratownicy
18kN
16kN
A
4
3
V =4kN
1H =18kN
11
2
V =20kN
23
4
18
4
15
15
20
5
25
N
[kN]
3
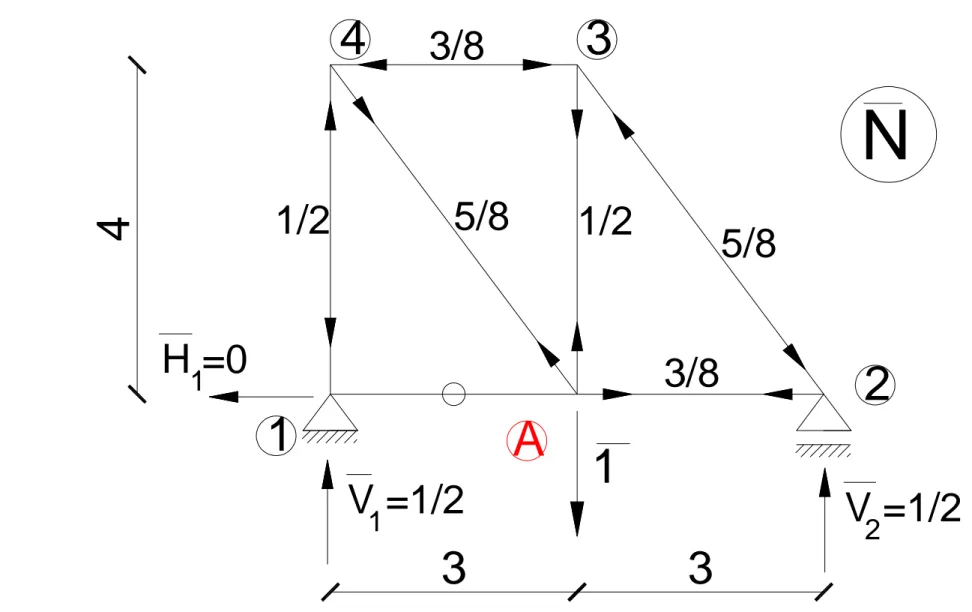
Obci
ąż
enie wirtualne
1
A
4
3
3
1
2
Obci
ąż
enie wirtualne
1
A
4
3
3
V =1/2
1H =0
11
2
V =1/2
2Wyznaczenie sił od obci
ąż
enia wirtualnego
1
A
4
3
3
V =1/2
1H =0
11
2
V =1/2
24
3
S
1S
2D
1D
2G
1K
1K
2Wykres sił od obci
ąż
enia wirtualnego
1
A
4
3
3
V =1/2
1H =0
11
2
V =1/2
23
4
1/2
3/8
3/8
1/2
5/8
5/8
N
Wyznaczenie przemieszczenia
1 A 4 3 3 V =1/2 1 H =0 1 1 2 V =1/2 2 3 4 1/2 3/8 3/8 1/2 5/8 5/8N
18kN 16kN A 4 3 V =4kN 1 H =18kN 1 1 2 V =20kN 2 3 4 18 4 15 15 20 5 25N
[kN] 3(
)
EA
EA
EA
EA
v
A4
513
5
8
5
25
5
8
5
5
1
3
8
3
15
3
8
3
15
3
18
0
1
4
5
,
0
20
4
)
5
,
0
(
4
1
=
⋅
⋅
−
⋅
⋅
−
+
⋅
−
⋅
−
⋅
⋅
+
⋅
⋅
+
⋅
⋅
+
⋅
−
⋅
=
Metoda Sił
• Metoda rozwi
ą
zywania układów statycznie
niewyznaczalnych
• Układy statycznie niewyznaczalne –
układy maj
ą
ce wi
ę
cej reakcji ni
ż
liczba
równa
ń
równowagi
• Liczba niewiadomych reakcji okre
ś
la
stopie
ń
statycznej niewyznaczalno
ś
ci
Stopie
ń
statycznej niewyznaczalno
ś
ci dla belek
i ram bez obwodu zamkni
ę
tego:
3
−
−
=
r
P
s
l
l
n
l
r
–
liczba reakcji w układzie
l
P
–
liczba przegubów z uwzgl
ę
dnieniem ich krotno
ś
ci
Metoda Sił – tok post
ę
powania
• Wyznaczamy stopie
ń
statycznej
niewyznaczalno
ś
ci układu
2
3
0
5
−
−
=
=
s
n
Metoda Sił – tok post
ę
powania
• Konstrukcj
ę
pozbawiamy wi
ę
zów, tak aby powstał
układ statycznie wyznaczalny i geometrycznie
Metoda Sił – tok post
ę
powania
• W miejscu usuni
ę
tych wi
ę
zów wprowadzamy nadliczbowe
niewiadome – uogólnione siły,
zamiast blokady przesuwu – siły skupione
zamiast blokady obrotu - moment
Metoda Sił – tok post
ę
powania
• Obci
ąż
amy schemat podstawowy pierwsz
ą
nadliczbow
ą
X
1=1
X =1
1
11
21
d11 – wartość przemieszczenia na kierunku działania X1,pod wpływem obciążenia
układu podstawowego siłą X1 =1
d21 – wartość przemieszczenia
na kierunku działania X2,
pod wpływem obciążenia
układu podstawowego siłą X1 =1
Metoda Sił – tok post
ę
powania
• Wyznaczenie
d
11X =1
1
M
1
1
M
∫
∫
=
=
s sds
EI
M
M
ds
EI
M
M
1 1 1 11δ
Metoda Sił – tok post
ę
powania
• Wyznaczenie
d
21X =1
1M
11
M
X =1
2M
2∫
∫
=
=
s sds
EI
M
M
ds
EI
M
M
1 1 2 21δ
Metoda Sił – tok post
ę
powania
• Obci
ąż
amy schemat podstawowy drug
ą
nadliczbow
ą
X
2=1
X =1
2
12
22
d22 – wartość przemieszczenia
na kierunku działania X2,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
d12 – wartość przemieszczenia
na kierunku działania X1,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
d22 – wartość przemieszczenia
na kierunku działania X2,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
d12 –
d22 – wartość przemieszczenia
na kierunku działania X2,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
wartość przemieszczenia
na kierunku działania X1,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
d12 –
d22 – wartość przemieszczenia
na kierunku działania X2,
pod wpływem obciążenia
układu podstawowego siłą X2 =1
Metoda Sił – tok post
ę
powania
• Wyznaczenie
d
22i
d
12X =1
1M
1X =1
2M
2 2X =1
2 12 2X =1
1 11 21∫
=
sds
EI
M
M
2 2 22δ
∫
=
sds
EI
M
M
1 2 12δ
Metoda Sił – tok post
ę
powania
• Wpływ obci
ąż
enia zewn
ę
trznego -
d
10
i
d
20 X =11 M1 X =12 M2 X =12 12 22 X =11 11 21 M0 wartość przemieszczenia na kierunku działania X2,pod wpływem obciążenia
układu podstawowego
obciążeniem zewnętrznym
d20 –
d10 – wartość przemieszczenia
na kierunku działania X1,
pod wpływem obciążenia
układu podstawowego
Metoda Sił – tok post
ę
powania
• Wpływ obci
ąż
enia zewn
ę
trznego -
d
10
i
d
20 X =11 M1 X =12 M2 X =12 12 22 X =11 11 21 M0∫
=
sds
EI
M
M
1 0 10δ
∫
=
sds
EI
M
M
2 0 20δ
Metoda Sił – tok post
ę
powania
• Ogólnie – w przypadku belek i ram pod obci
ąż
eniem
statycznym
X =11 M1 X =12 M2 X =12 12 22 X =11 11 21 M0∫
=
s k j jkds
EI
M
M
δ
∫
=
s j jds
EI
M
M
0 0δ
Metoda Sił – tok post
ę
powania
W rzeczywistym schemacie statycznie niewyznaczalnym
przemieszczenia w miejsce podpór s
ą
równe 0, st
ą
d
X =11 M1 X =12 M2 X =12 12 22 X =11 11 21 M0
Przemieszczenie na podporze 1
0
10 2 12 1 11 1=
δ
⋅
+
δ
⋅
+
δ
=
δ
X
X
Przemieszczenie na podporze 2
0
20 2 22 1 21 2=
δ
⋅
+
δ
⋅
+
δ
=
δ
X
X
Układ równa
ń
kanonicznych metody sił
dla schematu dwukrotnie statycznie niewyznaczalnego:
X =11 M1 X =12 M2 X =12 12 22 X =11 11 21 M0 2 1 20 2 22 1 21 10 2 12 1 11
,
0
0
X
X
X
X
X
X
⇒
=
+
⋅
+
⋅
=
+
⋅
+
⋅
δ
δ
δ
δ
δ
δ
Wyznaczenie warto
ś
ci momentu w punkcie „i”
od obci
ąż
enia zewn
ę
trznego dla układu
statycznie niewyznaczalnego:
0 2 2 1 1 i i i iM
X
M
X
M
M
=
⋅
+
⋅
+
Metoda sił – tok post
ę
powania, podsumowanie:
=
+
⋅
+
+
⋅
+
⋅
=
+
⋅
+
+
⋅
+
⋅
=
+
⋅
+
+
⋅
+
⋅
0
...
...
...
...
...
...
...
...
0
...
0
...
0 2 2 1 1 20 2 2 22 1 21 10 1 2 12 1 11 n n nn n n n n n nX
X
X
X
X
X
X
X
X
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
δ
• Obliczenie stopnia statycznej niewyznaczalno
ś
ci,
• Przyj
ę
cie schematu podstawowego statycznie wyznaczalnego
• Wrysowane wykresów od nadliczbowych X
1,, X
2,…, X
n• Wyznaczenie współczynników układu równa
ń
• Rozwi
ą
zanie równa
ń
i obliczenie nadliczbowych X
1, X
2, …,X
3• Wyznaczenie warto
ś
ci momentów w charakterystycznych
punktach na podstawie wzoru:
0 2 2 1 1 i i i i
![Wykres sił normalnych w kratownicy 18kN A 16kN4 3 V =4kN1H =18kN11 2 V =20kN234184151552025N[kN]3](https://thumb-eu.123doks.com/thumbv2/9liborg/3038565.6156/5.1263.135.1021.190.786/wykres-sił-normalnych-kratownicy-kn-a-kn-v.webp)