Stateczność ramy drewnianej o 2 różnych przekrojach prętów, obciążonej siłą skupioną
ORIGIN := 1 - Ustawienie sposobu numeracji wierszy i kolumn macierzy
E := 10GPa - Moduł Younga drewna
Wymiary przekrojów
a1 := 7cm b1 := 7cm
a2 := 7cm b2 := 10cm
Parametry pomocnicze:
Lss := 3 - Liczba stopni swobody węzła
Le:= 5 - Liczba elementów
Lw:= 6 - Liczba węzłów
Lr:= Lss Lw× - Liczba równań
KoLr Lr, := 0 Deklaracja globalnej macierzy sztywności i wypełnienie jej zerami
Ponieważ MathCad nie pozwala przechowywać w jednej macierzy składowych wyrażonych w różnych jednostkach to mamy do wyboru 2 mozliwości:
- nie zapisywać jednostek w których wyrażone są te składowe
- przekształcić tak te składowe, aby były jednolite (wyrażone w jednakowych jednostkach miary) Wybieram 2 sposób i przekształcam niewiadome występujące w macierzach następująco
( l - oznacza tu dowolną stałą o wymiarze długości) :
uzi l φi= × uzj l φj= × Mi l Ti= × Mj l Tj= × λ2 L
2×A
J
= η L
l
=
Wszystkie poszukiwane przemieszczenia są więc przesunięciami, a węzłowe wielkości statyczne - siłami. Macierz sztywności zmieni sie więc do postaci, którą MathCad akceptuje:
Fxi Fyi Ti Fxj Fjy Tj æç ç ç ç ç ç ç çè ö÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ø E J× L3 λ2 0 0 λ2 -0 0 0 12 6η 0 12 -6η 0 6η 4η2 0 6η -2η2 λ2 -0 0 λ2 0 0 0 12 -6η -0 12 6η -0 6η 2η2 0 6η -4η2 æ ç ç ç ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ ø S L 0 0 0 0 0 0 0 1.2 0.1η 0 1.2 -0.1η 0 0.1η 2 15η 2 0 0.1 - η 1 -30η 2 0 0 0 0 0 0 0 1.2 -0.1 - η 0 1.2 0.1 - η 0 0.1η 1 -30η 2 0 0.1 - η 2 15η 2 æ ç ç ç ç ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ ø × + é ê ê ê ê ê ê ê ê ê ê ë ù ú ú ú ú ú ú ú ú ú ú û uxi uyi uzi uxj uyj uzj æç ç ç ç ç ç ç çè ö÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ø × =
Funkcja LBM - Lokuj Blok Macierzy, używana przy agregacji macierzy sztywności i wektora obciążeń termicznych LBM A B( , , w, k) Aw i+ , k j+ ¬B1 i+ , 1 j+ j 0Î .. cols B( ) 1 -for i 0Î .. rows B( ) 1 -for A :=
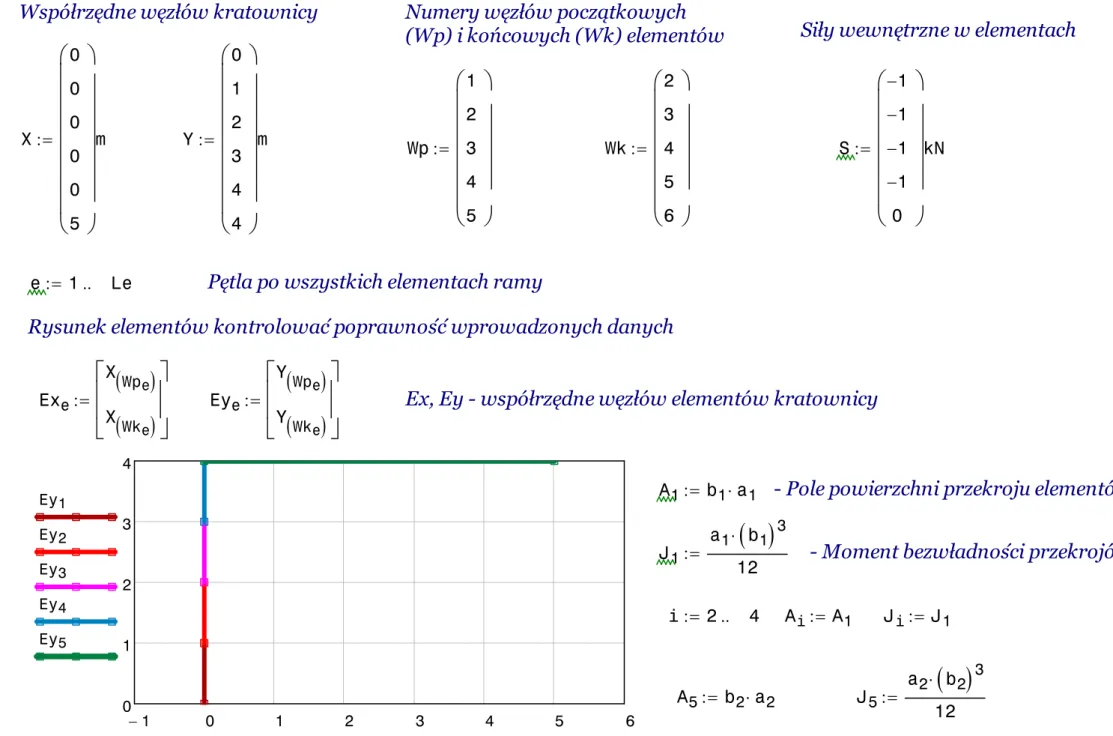
Współrzędne węzłów kratownicy Numery węzłów początkowych
(Wp) i końcowych (Wk) elementów Siły wewnętrzne w elementach
X 0 0 0 0 0 5 æç ç ç ç ç ç ç çè ö÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ø m := Y 0 1 2 3 4 4 æç ç ç ç ç ç ç çè ö÷ ÷ ÷ ÷ ÷ ÷ ÷ ÷ø m := Wp 1 2 3 4 5 æ ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ø := Wk 2 3 4 5 6 æ ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ø := S 1 -1 -1 -1 -0 æ ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ø kN :=
e := 1.. Le Pętla po wszystkich elementach ramy
Rysunek elementów kontrolować poprawność wprowadzonych danych
Exe X Wp e
( )
X Wk e( )
é ê ê ë ù ú ú û := Eye Y Wp e( )
Y Wk e( )
é ê ê ë ù ú ú û:= Ex, Ey - współrzędne węzłów elementów kratownicy
1 - 0 1 2 3 4 5 6 0 1 2 3 4 Ey1 Ey2 Ey3 Ey4 Ey5 Ex1, Ex2, Ex3, Ex4, Ex5
A1 := b1×a1 - Pole powierzchni przekroju elementów J1 a1
( )
b13
× 12
:= - Moment bezwładności przekrojów
i := 2.. 4 Ai := A1 Ji := J1 A5 := b2×a2 J5 a2
( )
b2 3 × 12 :=Wielkości pomocnicze do wyliczania składowych macierzy sztywności elementów ramy Lxe X Wk e
( )
-X( )
Wpe := Lye Y Wk e( )
-Y( )
Wpe := Le :=( )
Lxe 2+( )
Lye 2 Lx 1 1 2 3 4 5 0.000 0.000 0.000 0.000 5.000 m = Ly 1 1 2 3 4 5 1.000 1.000 1.000 1.000 0.000 m = L 1 1 2 3 4 5 1.000 1.000 1.000 1.000 5.000 m = A 1 1 2 3 4 5 49.000 49.000 49.000 49.000 70.000 cm2 × = J 1 1 2 3 4 5 200.083 200.083 200.083 200.083 583.333 cm4 × = ηe Le l := λ2e( )
Le 2 A e × Je := μe E J× e Le( )
3 := κe Se Le := η 1 1 2 3 4 5 1.000 1.000 1.000 1.000 5.000 = λ2 1 1 2 3 4 5 2448.980 2448.980 2448.980 2448.980 30000.000 = μ 1 1 2 3 4 5 20008.333 20008.333 20008.333 20008.333 466.667 N m × = κ 1 1 2 3 4 5 -1000.000 -1000.000 -1000.000 -1000.000 0.000 N m × =Bloki macierzy sztywności elementu ramowego w lokalnym układzie współrzednych K11e μe λ2e 0 0 0 12 6 ηe 0 6 ηe 4 η
( )
e 2 éê ê ê êë ùú ú ú úû × := K12e μe λ2e -0 0 0 12 -6 - ηe 0 6 ηe 2 η( )
e 2 éê ê ê êë ùú ú ú úû × := K22e μe λ2e 0 0 0 12 6 - ηe 0 6 - ηe 4 η( )
e 2 éê ê ê êë ùú ú ú úû × :=Macierz sztywności elementu zapisana z użyciem bloków
K K11 K21 K12 K22 æ ç è ö ÷ ø = K21 = K12T
Bloki macierzy geometrycznych elementu ramowego w lokalnym układzie współrzednych
G11e κe 0 0 0 0 1.2 0.1 ηe 0 0.1 ηe 2 15
( )
ηe 2 é ê ê ê ê ë ù ú ú ú ú û × := G12e κe 0 0 0 0 1.2 -0.1 - ηe 0 0.1 ηe 1 -30( )
ηe 2 é ê ê ê ê ë ù ú ú ú ú û × := G22e κe 0 0 0 0 1.2 0.1 - ηe 0 0.1 - ηe 2 15( )
ηe 2 é ê ê ê ê ë ù ú ú ú ú û × :=Macierz geometryczna elementu zapisana z użyciem bloków
G G11 G21 G12 G22 æ ç è ö ÷ ø = G21 = G12T
Macierze obrotu do globalnego układu współrzednych ce Lxe Le := se Lye Le := Re ce se 0 se -ce 0 0 0 1 æ ç ç ç è ö ÷ ÷ ÷ ø := R1 0 1 0 1 -0 0 0 0 1 æç ç ç è ö÷ ÷ ÷ ø = R2 0 1 0 1 -0 0 0 0 1 æç ç ç è ö÷ ÷ ÷ ø =
Transformacja macierzy sztywności i macierzy geometrycznych elementu 1 do globalnego układu współrzędnych.
Uwaga!
Macierzy elementu 5 można nie transformować bo kąt obrotu jest równy 0 Macierze elementów 1..4 są identyczne
K11e:= Re×K11e×ReT K12e:= Re×K12e×ReT K22e:= Re×K22e×ReT G11e:= Re×G11e×ReT G12e:= Re×G12e×ReT G22e:= Re×G22e×ReT
Mimo, że nie jest to potrzebne w dalszych obliczeniach, można pokazać bloki macierzy wszystkich elementów K111 240.1 0 120.05 -0 49000 0 120.05 -0 80.033 æç ç ç è ö÷ ÷ ÷ ø kN m × = K115 14000 0 0 0 5.6 14 0 14 46.667 æç ç ç è ö÷ ÷ ÷ ø kN m × = K121 240.1 -0 120.05 0 49000 -0 120.05 -0 40.017 æç ç ç è ö÷ ÷ ÷ ø kN m × = K125 14000 -0 0 0 5.6 -14 -0 14 23.333 æç ç ç è ö÷ ÷ ÷ ø kN m × = K221 240.1 0 120.05 0 49000 0 120.05 0 80.033 æç ç ç è ö÷ ÷ ÷ ø kN m × = K225 14000 0 0 0 5.6 14 -0 14 -46.667 æç ç ç è ö÷ ÷ ÷ ø kN m × = G111 1.2 -0 0.1 0 0 0 0.1 0 0.133 -æç ç ç è ö÷ ÷ ÷ ø kN m × = G121 1.2 0 0.1 -0 0 0 0.1 0 0.033 æç ç ç è ö÷ ÷ ÷ ø kN m × = G221 1.2 -0 0.1 -0 0 0 0.1 -0 0.133 -æç ç ç è ö÷ ÷ ÷ ø kN m × = G115 0 0 0 0 0 0 0 0 0 æç ç ç è ö÷ ÷ ÷ ø kN m × = G125 0 0 0 0 0 0 0 0 0 æç ç ç è ö÷ ÷ ÷ ø kN m × = G225 0 0 0 0 0 0 0 0 0 æç ç ç è ö÷ ÷ ÷ ø kN m × =
Agregacja, czyli dodawanie bloków macierzy sztywności elementów do macierzy globalnej
ne := Lss Wp× e-2 ke := Lss Wk× e-2 <--- numery stopni swobody węzłów początkowych (ne) i końcowych (ke)
nT = (1 4 7 10 13 ) kT = (4 7 10 13 16 ) K e LBM Ko K11
(
, e, ne, ne)
+LBM Ko K22(
, e, ke, ke)
(
)
+LBM Ko K12(
, e, ne, ke)
+LBM Ko K12(
, eT , ke, ne)
é ë ùûå
:= G e LBM Ko G11(
, e, ne, ne)
+LBM Ko G22(
, e, ke, ke)
(
)
+LBM Ko G12(
, e, ne, ke)
+LBM Ko G12(
, eT , ke, ne)
é ë ùûå
:= K 1 2 3 4 5 6 7 8 9 10 11 12 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 240.1 0.0 -120.1 -240.1 0.0 -120.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 49000.0 0.0 0.0 -49000.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -120.1 0.0 80.0 120.1 0.0 40.0 0.0 0.0 0.0 0.0 0.0 0.0 -240.1 0.0 120.1 480.2 0.0 0.0 -240.1 0.0 -120.1 0.0 0.0 0.0 0.0 -49000.0 0.0 0.0 98000.0 0.0 0.0 -49000.0 0.0 0.0 0.0 0.0 -120.1 0.0 40.0 0.0 0.0 160.1 120.1 0.0 40.0 0.0 0.0 0.0 0.0 0.0 0.0 -240.1 0.0 120.1 480.2 0.0 0.0 -240.1 0.0 -120.1 0.0 0.0 0.0 0.0 -49000.0 0.0 0.0 98000.0 0.0 0.0 -49000.0 0.0 0.0 0.0 0.0 -120.1 0.0 40.0 0.0 0.0 160.1 120.1 0.0 40.0 0.0 0.0 0.0 0.0 0.0 0.0 -240.1 0.0 120.1 480.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -49000.0 0.0 0.0 98000.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -120.1 0.0 40.0 0.0 0.0 160.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -240.1 0.0 120.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -49000.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -120.1 0.0 40.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 ... kN m × =G 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 -1.2 0.0 0.1 1.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 -0.1 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.2 0.0 -0.1 -2.4 0.0 0.0 1.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 0.0 0.0 0.0 -0.3 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.2 0.0 -0.1 -2.4 0.0 0.0 1.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 0.0 0.0 0.0 -0.3 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.2 0.0 -0.1 -2.4 0.0 0.0 1.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 0.0 0.0 0.0 -0.3 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.2 0.0 -0.1 -1.2 0.0 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 0.0 -0.1 0.0 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 kN m × =
Globalna macierz sztywności K i macierz geometryczna G bez uwzględnienia warunków brzegowych jest osobliwa tzn. |K|=0 , |G|=0
Aby obliczyć wyznacznik macierzy, której elementy nie są liczbami bezwymiarowymi musimy macierz pomnożyć przez odwrotność jednostek aby doprowadzić elementy do postaci bezwymiarowej - to jest wymóg MatCada.
Zamiast zera wyznacznik może być "bardzo małą" liczbą ze względu na niedostateczną dokładność wyrazów macierzy sztywności.
K 1m kN × = 0.000 10´ 0 G 1m kN × = 0.000 10´ 0
Kopiowanie Macierzy K przed modyfikacją uwzględniającą warunki brzegowe
Ko:= K Go:= G
Uwzględnienie warunków brzegowych
Lwb := 5 - liczba warunków brzegowych
s 1 2 3 16 17 æ ç ç ç ç ç ç è ö ÷ ÷ ÷ ÷ ÷ ÷ ø
:= - globalne numery przemieszczeń węzłów blokowanych na podporach
i := 1.. Lr j := 1.. Lwb Kos j, i:= 0 Gosj, i:= 0 zerowanie wierszy Koi s j , := 0 Goi s, j:= 0 zerowanie kolumn
wstawianie jedności na przekątną macierzy sztywności Kos j, sj 1 kN m := Ko 1× m kN 5.882 10 39 ´
= - wyznacznik macierzy Ko jest zawsze większy od zera, |Ko|> 0
Go 1× m
kN 0.000 10
0
´
Ko 1 2 3 4 5 6 7 8 9 10 11 12 13 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 480.2 0 0 -240.1 0 -120.1 0 0 0 0 0 0 0 0 98000 0 0 -49000 0 0 0 0 0 0 0 0 0 0 160.1 120.1 0 40 0 0 0 0 0 0 0 -240.1 0 120.1 480.2 0 0 -240.1 0 -120.1 0 0 0 0 0 -49000 0 0 98000 0 0 -49000 0 0 0 0 0 -120.1 0 40 0 0 160.1 120.1 0 40 0 0 0 0 0 0 0 -240.1 0 120.1 480.2 0 0 -240.1 0 0 0 0 0 0 0 -49000 0 0 98000 0 0 0 0 0 0 0 0 -120.1 0 40 0 0 160.1 120.1 0 0 0 0 0 0 0 0 0 -240.1 0 120.1 14240.1 0 0 0 0 0 0 0 0 0 0 -49000 0 0 0 0 0 0 0 0 0 0 0 -120.1 0 40 ... kN m × = Go 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -2.4 0 0 1.2 0 0.1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -0.267 -0.1 0 0.033 0 0 0 0 0 0 0 0 0 1.2 0 -0.1 -2.4 0 0 1.2 0 0.1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.1 0 0.033 0 0 -0.267 -0.1 0 0.033 0 0 0 0 0 0 0 0 0 1.2 0 -0.1 -2.4 0 0 1.2 0 0.1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.1 0 0.033 0 0 -0.267 -0.1 0 0.033 0 0 0 0 0 0 0 0 0 1.2 0 -0.1 -1.2 0 -0.1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ... kN m × =
Ko σ Go+ × = 0 - warunek niejednoznacznosci przemieszczeń, czyli mozliwość utraty stateczności KG σ( ) (Ko σ Go+ × ) m
kN × :=
Oszacowanie wartości siły krytycznej "z góry" i "z dołu" N := 1000 i := 1.. N σi := i 0.1× Wi := KG σ
( )
i P1 π 2×E J 1 × 0.5 Y× 5(
)
2 := 0 10 20 30 40 50 60 70 80 90 100 1 -1 2 3 4 5 6 Wi 1039 σi P2 π 2×E J 1 × 0.699 Y× 5(
)
2 := P1 = 49.369 kN× P2 = 25.260 kN×N1:= 39370 N2:= 39380
i := N1.. N2 σi := i 0.001× Wi := KG σ
( )
iSiła krytyczna (pierwsza wartość własna) ma przybliżoną wartość Pkr=39,372 kN 39.37 39.371 39.372 39.373 39.374 39.375 39.376 39.377 39.378 39.379 39.38 4 -3 -2 -1 -1 2 Wi 1035 σi
Siła krytyczna (pierwsza wartość własna) wyliczona za pomocą Algora, przy podziale pręta poziomego i pionowego na 10 elementów Pkr=34,4645 kN
N1:= 86000 N2:= 87000
i := N1.. N2 σi := i 0.001× Wi := KG σ
( )
iDruga wartość własna ma przybliżoną wartość σ2=86,55 kN 86 86.1 86.2 86.3 86.4 86.5 86.6 86.7 86.8 86.9 87 200 -150 -100 -50 -50 100 Wi 1035 σi
Druga wartość własna wyliczona za pomocą Algora, przy podziale pręta poziomego i pionowego na 10 elementów