http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html
HTTPS://EPORTAL.PWR.EDU.PL/COURSE/VIEW.PHP?ID=16236
Miejsce konsultacji: pokój 27 bud. A-1; Terminy podam na stronie internetowej! Dr hab. inż. Władysław Artur Woźniak, prof. uczelni
Katedra Optyki i Fotoniki
Wydział Podstawowych Problemów Techniki Politechnika Wrocławska
Wykład FIZYKA I
KINEMATYKA PUNKTU MATERIALNEGO
Kinematyka zajmuje się związkami między położeniem,
prędkością i przyspieszeniem badanej cząstki – nie obchodzi
nas, skąd bierze się przyspieszenie ani przyczyna, która ruch
powoduje (SIŁA).
Pojęcia wstępne
Ruch mechaniczny – zmiana wzajemnego położenia ciał w przestrzeni (lub jednych
ich części względem drugich) pod wpływem czasu.
Punkt materialny – ciało, którego rozmiary i kształty możemy w danym zagadnieniu pominąć.
Układ odniesienia – ciało, jego część lub grupa ciał względem siebie nieruchomych, względem których podajemy położenie danego ciała w przestrzeni (nie mylić z układem współrzędnych).
Równania ruchu – opisują zmiany położenia ciała w przestrzeni w funkcji czasu.
Układy współrzędnych
KINEMATYKA PUNKTU MATERIALNEGO
Układy współrzędnych
3D układ współrzędnych biegunowych
Układy współrzędnych
3D układ współrzędnych cylindrycznych
KINEMATYKA PUNKTU MATERIALNEGO
Układy współrzędnych
3D układ współrzędnych sferycznych
Dowolnemu punktowi M przypisujemy jegowspółrzędne sferyczne:
1. promień wodzący r0 czyli odległość punktu M od początku układu O,
2. długość azymutalną 0<2 czyli miarę kąta między rzutem prostokątnym wektora OM na płaszczyznę OXY a dodatnią półosią OX.
3. odległość zenitalną 0 czyli miarę kąta między wektorem OM a dodatnią półosią OZ.
(Wikipedia)
Podstawowe zasady:
Zasada niezależności ruchów (superpozycji) – jeśli jakiś punkt
bierze udział jednocześnie w kilku ruchach, to wypadkowe
przesunięcie punktu równe jest sumie wektorowej przesunięć
wykonanych przez ten punkt w tym samym czasie w każdym z
tych ruchów oddzielnie.
Względność ruchu – każdy ruch mechaniczny jest względny,
bo polega na wzajemnym przemieszczaniu się ciał; charakter
ruchu ciała jest różny w zależności od układu odniesienia.
NIEZWYKLE WAŻNE
Prędkość
Wielkość wektorowa, która określa zarówno szybkość ruchu, jak i jego
kierunek w danej chwili.
Prędkość chwilowa:
Jednostką jest metr na sekundę.
dt
r
d
t
t
t
r
t
r
v
t t
0 0 0lim
2 2 0 0 0lim
dt
r
d
dt
v
d
t
t
t
v
t
v
a
t t
Definicje podstawowych wielkości
Przyspieszenie
Wielkość wektorowa, która określa zmiany wektora prędkości w czasie
(zarówno wartości, jak i kierunku).
Przyspieszenie chwilowe:
KINEMATYKA PUNKTU MATERIALNEGO
Klasyfikacja ruchów
Ze względu na tor (trajektorię) ruchu:
- prostoliniowe
(postępowe);
- krzywoliniowe (w tym:
po okręgu, rzut ukośny);
Ze względu na zależność położenia od czasu:
- jednostajne;
- jednostajnie zmienne
(przyspieszone, opóźnione);
-
pozostałe...*;
Ruchy prostoliniowe (postępowe)
Ruch jednostajny
„Jednostajność” oznacza liniową zależność położenia od czasu i (tym samym) stałość prędkości:
– to wektor położenia początkowego (związany z wyborem układu współrzędnych);
– to wektor prędkości początkowej (w tym wypadku jest ona stała w czasie całego ruchu);
0
0r
r
0
0v
v
t
r
v
t
r
0
0
v
t
v
0
const
t
KINEMATYKA PUNKTU MATERIALNEGO
Ruch jednostajnie przyspieszony
Tu „jednostajne przyspieszenie” oznacza stałość przyspieszenia od czasu:
(oznaczenia jak poprzednio)
2
2 0 0t
a
t
v
r
t
r
t
a
v
t
v
0
a
t
const
t
a
v
0
Ruch jednostajnie opóźniony
skierowany przeciwnie do
Ruchy krzywoliniowe
M D C
t
CD
t
BC
t
BD
t
t
t
v
t
v
a
t t t t t
0 0 0 00
lim
lim
lim
lim
0
t
CD
a
t s
lim
0
– to przyspieszenie styczne:dt
dv
a
s
t
BC
a
t n
lim
0
– to przyspieszenie normalne:R
v
a
n 2
gdzie: R jest promieniem krzywizny toru.
) (t v
const
t
v
(
)
const
t
v
(
)
aczkolwiek może być:KINEMATYKA PUNKTU MATERIALNEGO
dt
dv
a
s
0
sa
0
const
a
sR
v
a
n 2
0
na
R
s
R
1
s na
a
a
2 2 s na
a
a
Przyspieszenie styczne: – charakteryzuje szybkość zmiany liczbowej
wartości prędkości ruchu;
gdy to ruch nazywamy jednostajnym (po okręgu); gdy to jest to ruch jednostajnie zmienny (po okręgu);
– charakteryzuje szybkość zmiany kierunku prędkości ruchu;
promień krzywizny definiowany jest poprzez: przyspieszenie całkowite:
Przyspieszenie normalne:
w ruchu prostoliniowym:
n
a
a
d d sa
a
0
s
a
R
v
a
d 2
Torem jest okrąg – trzeba definiować?
• zawsze jest spełniony warunek:
Ruchem jednostajnym po okręgu
nazywamy ruch, w którym:
i
• przyspieszenie normalne nazywamy teraz dośrodkowym
R
d
a
s
KINEMATYKA PUNKTU MATERIALNEGO
„Kątowe” wielkości kinematyczne w ruchu po okręgu:
- prędkość kątowa: (pseudowektor)
-
przyspieszenie kątowe: (pseudowektor)
Parametry ruchu po okręgu:
- okres ruchu:
- częstotliwość obiegu:
Związki między wielkościami kątowymi i liniowymi w ruchu po okręgu
dt
d
2 2d
d
dt
dt
2
T
2
1
T
f
R
v
a
sR
(to NIE jest definicja OKRESU!)
Ruch dwuwymiarowy – rzut ukośny
x y L H v0yKorzystając z zasady superpozycji:
Ruch w kierunku „x”: jednostajny z prędkością
Ruch w kierunku „y”: jednostajnie opóźniony z prędkością początkową i przyspieszeniem
cos
0v
v
ox
sin
0v
v
oy
g
v0xg
0v
KINEMATYKA PUNKTU MATERIALNEGO
Równania ruchu:
Składowe prędkości:
Trajektoria ruchu:
(jak ją otrzymać?)
Parametry toru (jak je wyznaczyć z równań ruchu?):
- zasięg:
- maksymalna wysokość wzniesienia:
t
v
t
x
0x
2
2 0gt
t
v
t
y
y
x xt
v
v
0v
y
t
v
0y
gt
2 2cos
2
v
x
g
x
tg
x
y
o
g
v
L
sin
2
2 0
g
v
H
2
sin
2 2 0
Ruch dwuwymiarowy – rzut ukośny
TO musimy umi eć n ap isa ć!
Wartości średnie na przykładzie prędkości
Ruch jednostajny:
Ruch ze zmienną prędkością:
Przy ciągłej zmianie prędkości:
0 0t
t
t
x
t
x
v
n i n n i n n n i n n i nt
t
v
t
s
v
1 1 1 1
a b b at
t
dt
t
v
v
EGZAMIN - TESTY
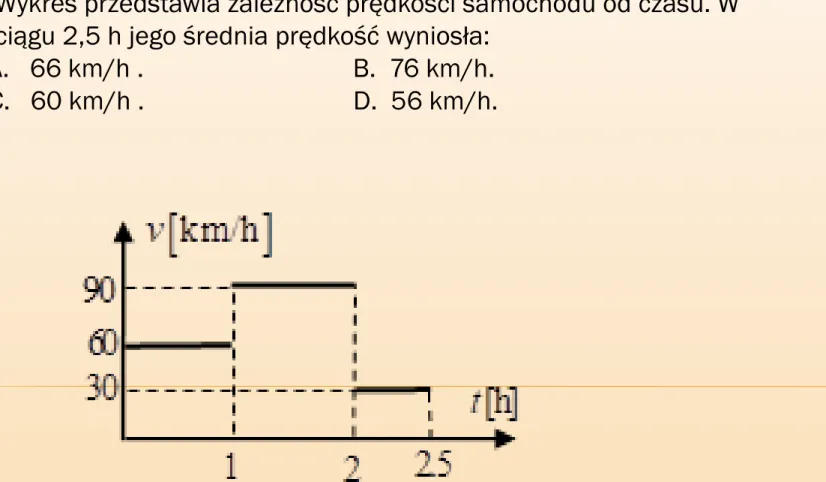
1. Wykres przedstawia zależność prędkości samochodu od czasu. W ciągu 2,5 h jego średnia prędkość wyniosła:
A. 66 km/h . B. 76 km/h.
2. Ciało porusza się wzdłuż osi OX ruchem jednostajnie zmiennym tak jak na rysunku obok. Z rysunku wynika, że nieprawdziwe jest następujące zdanie. A. Wektor przyspieszenia ciała jest przeciwny do kierunku ruchu, a długość wektora położenia maleje.
B. Wektor przyspieszenia ciała jest przeciwny do kierunku ruchu a długość wektora prędkości maleje.
C. Wektor przyspieszenia ciała jest przeciwny do kierunku prędkości i przeciwny do wektora położenia.
D. Wektor położenia ciała jest przeciwny do kierunku ruchu a długość wektora prędkości maleje.
EGZAMIN - TESTY
3. W czasie rzutu ukośnego ciało porusza się po torze krzywoliniowym, w którym przyspieszenie wypadkowe ciała jest
A. zawsze prostopadłe do ziemi. B. zawsze styczne do toru ruchu. C. zawsze prostopadłe do toru.
D. w fazie wznoszącej toru jest skierowane ku górze, a w fazie opadającej ku dołowi.
4. Z wysokości h rzucono dwie piłki z prędkościami o tej samej wartości v0, jedną pionowo do góry a drugą pionowo w dół. Jeśli nie uwzględnimy oporu powietrza, to o wartościach prędkości v1 i v2 piłek w chwili upadku na ziemię możemy powiedzieć, że
A. v1 = v2. B. v1 > v2. C. v1 < v2. D. prędkości zależą od mas piłek.