Układy dynamiczne.
Klasyfikacja punktów
stacjonarnych na
płaszczyźnie
Autorzy:
Vsevolod Vladimirov
2019
(1)
(2)
Układy dynamiczne. Klasyfikacja punktów stacjonarnych na płaszczyźnie
Układy dynamiczne. Klasyfikacja punktów stacjonarnych na płaszczyźnie
Autor: Vsevolod VladimirovRozpatrzmy układ równań różniczkowych zwyczajnych, których prawe strony nie zależą od zmiennej :
Będziemy zakładać, że funkcje są różniczkowalne w sposób ciągły po wszystkich zmiennych Układ
Układ ( 1 )( 1 ) nazywa się układem autonomicznym, albo też układem dynamicznym nazywa się układem autonomicznym, układem dynamicznym.
DEFINICJA
Definicja 1:
Definicja 1:
Punkt nazywa się punktem stacjonarnympunktem stacjonarnym układu ( 1 ), jeżeli .
Zamiast pełnego układu ( 1 ), w małym otoczeniu punktu stacjonarnego można rozpatrywać jego linearyzacjęlinearyzację . Rozpatrzmy prawą
stronę tego układu. Każdą funkcję można w otoczeniu punktu przedstawić, zgodnie ze
wzorem Taylora, w postaci
gdzie oraz
Zatem zachodzi
LEMAT
Lemat 1:
Lemat 1:
Układ dynamiczny w otoczeniu punktu stacjonarnego da się przedstawić w postaci
gdzie
Układ
Układ (2) nazywa się linearyzacją układu dynamicznego (2) nazywa się linearyzacją układu dynamicznego ( 1 )( 1 ) w otoczeniu punktu stacjonarnego w otoczeniu punktu stacjonarnego . Okazuje się, że przy pewnych warunkach, rozwiązania układu ( 1 ) oraz rozwiąznia układu liniowego ( 2 ) są w małym otoczeniu
n
t
= ( , . . . , ) ;
d x1 d tf
1x
1x
2x
n= ( , . . . , ) ;
d x2 d tf
2x
1x
2x
n. . . .
= ( , . . . , ) .
d xn d tf
nx
1x
2x
n, i = 1, . . . n,
f
ix
i.
(
x
1,0,
x
2,0, . . .
x
n,0) ∈
R
n(
,
, . . .
) = 0, i = 1, . . . n
f
ix
1,0x
2,0x
n,0( , , . . . )
f
ix
1x
2x
n(
x
1,0,
x
2,0, . . .
x
n,0)
( , , . . . ) =
(
,
, . . .
) ( −
) + O(|ξ ),
f
ix
1x
2x
n∑
nk=1 ∂ x∂fikx
1,0x
2,0x
n,0x
kx
k,0|
2ξ = ∑
n k=1( −
x
kx
k,0)
2−
−−−−−−−−−−−−
−
√
= 0.
lim
|ξ|→ 0 O(|ξ )|2 |ξ|(
x
1,0,
x
2,0, . . .
x
n,0)
=
+ O(|ξ ),
d d t⎡
⎣
⎢⎢
⎢
ξ
1ξ
2. . . .
ξ
n⎤
⎦
⎥⎥
⎥
⎡
⎣
⎢⎢
⎢
a
11a
21. . . .
a
n1a
12a
22. . . . .
a
n2. . .
. . .
. . . . .
. . .
a
1na
2n. . . .
a
nn⎤
⎦
⎥⎥
⎥
⎡
⎣
⎢⎢
⎢
ξ
1ξ
2. . . .
ξ
n⎤
⎦
⎥⎥
⎥
|
2=
−
,
=
(
,
, . . .
), i, j = 1, 2, . . . . n.
ξ
kx
kx
k,0a
i,j ∂ x∂ fijx
1,0x
2,0x
n,0(
x
1,0,
x
2,0, . . .
x
n,0)
(3)
(4)
(5)
(6) punktu stacjonarnego "jakościowo identyczne". Ponieważ rozwiązywać (analizować) układ liniowy jest na ogół niezmiernie prościej, niż układ pełny, opłaca się spróbować znaleźć warunki umożliwiające taką podmianę. To, czy zachowanie pełnego układu w otoczeniu punktu stacjonarnego jest rzeczywiście reprezentowane przez jego linearyzację, zależy od wartości własnych macierzy linearyzacji układu ( 2 ).
Przeanalizujemy to na przykładzie układu w , podając przy okazji klasyfikację prostych punktów stacjonarnych. Rozpatrzmy zatem układ równań
DEFINICJA
Definicja 2:
Definicja 2:
Zbiór zmiennych nazywamy płaszczyzną fazowąpłaszczyzną fazową układu ( 3 )
Portretem fazowym układu
Portretem fazowym układu ( 3 )( 3 ) nazywamy zbiór krzywych sparametryzowanych nazywamy zbiór krzywych sparametryzowanych
które tworzą rozwiązania
które tworzą rozwiązania tego układu.tego układu. Posługując się terminologią zapożyczoną w mechanice punktu materialnego, krzywe ( 4 ) nazywają też często trajektoriamitrajektoriami lub trajektoriami fazowymi.trajektoriami fazowymi.
Przystępujemy do klasyfikacji punktów stacjonarnych układu ( 3 ).
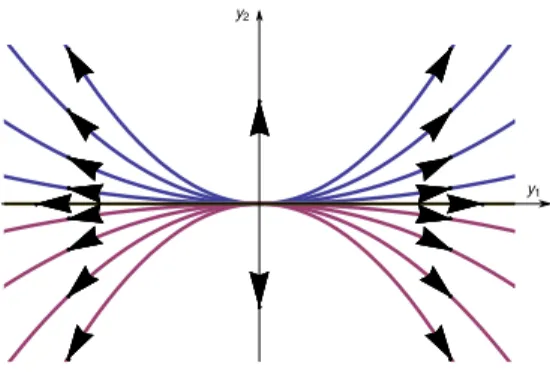
1. Przypadek, gdy wartości własne macierzy są rzeczywiste, różne, dodatnie.
Niech na przykład . Wtedy punkt przestrzeni fazowej nazywa się źródłemźródłem. Wówczas da się znaleźć taką liniową zamianę zmiennych
że układ ( 3 ) przybierze postać
Rozwiązaniem tego układu są wówczas funkcje
W przypadku, gdy , rozwiązanie to można przedstawić w postaci równoważnej, przedstawiając jako funkcję poprzez wyrugowanie :
gdzie
Portret fazowy układu ( 5 ) wygląda w tym przypadku tak, jak jest to pokazane na Rys. 1.
R
2[ ] = [
] [ ] = [ ] .
d d tη
ξ
a
a
11 21a
12a
22ξ
η
A^ ξ
η
(ξ, η) ∈ R
2C : { ξ = ξ[t],
η = η[t],
,
λ
1λ
2A^
0 <
λ
1<
λ
2(0, 0)
[ ] = [
y
1] [ ] ,
y
2b
11b
21b
12b
22ξ
η
[ ] = [
] [ ] .
d d ty
y
1 2λ
10
0
λ
2y
1y
2=
,
=
.
y
1C
1e
λ1ty
2C
2e
λ2t≠ 0
C
1y
2y
1t
=
,
y
2C
3y
λ2 λ1 1=
⋅ {
C
3C
21/
( )
C
1gdy
> 0,
/ λ2λ1C
1−1/ (| |
C
1)
λ2/λ1gdy
C
1< 0.
(7)
(8)
(9)
y1 y2
Rysunek 1: Portret fazowy układu (5)
Zwróćmy uwagę na to, że osie współrzędnych są trajektoriami fazowymi układu. Oś pozioma odpowiada przypadku , zaś oś pionowa odpowiada przypadkowi osobliwemu . Te dwie trajektorie fazowe nie są ujęte we wzorze ( 6 ).
2. Wartości własne macierzy są rzeczywiste, różne, ujemne.
Niech na przykład . Punkt przestrzeni fazowej nazywa się wówczas zlewemzlewem. Podobnie jak w przypadku poprzednim, istnieje liniowa zamiana zmiennych taka, że w nowych zmiennych układ ( 3 ) ma postać
Zauważmy teraz, że zamiana zmiennej niezależnej odzworowuje układ ( 7 ) w układ
równoważny układowi ( 5 ). Przekształcenie nazywa się odbiciem zmiennej czasowej. Prowadzi ono do tego, że ruch wzdłuż każdej trajektorii fazowej odbywa się w przeciwnym kierunku. Poza tym portret fazowy pozostaje bez zmian. Wynika stąd, że portret fazowy układu ( 7 ) będzie taki, jak pokazano na Rys. 2.
y1 y2
Rysunek 2: Portret fazowy układu (7)
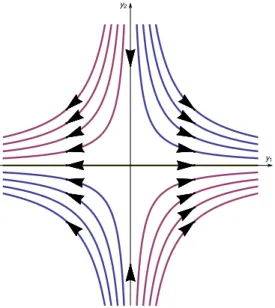
3. Przypadek gdy wartości własne macierzy są rzeczywiste, niezerowe i mają różne znaki. Niech, na przykład, . Wtedy punkt
przestrzeni fazowej nazywa się siodłemsiodłem. Wówczas istnieje liniowa zamiana zmiennych taka że w nowych zmiennych układ ( 3 ) ma postać
Rozwiązanie tego układu dane jest wzorami
W przypadku, gdy , rozwiązanie to można też przepisać w postaci równoważnej, przedstawiając jako funkcję poprzez wyrugowanie zmiennej :
= 0
C
2= 0
C
1,
λ
1λ
2A^
<
< 0
λ
2λ
1(0, 0)
(ξ, η) → ( , )
y
1y
2[ ] = [
] [ ] .
d d ty
y
1 2λ
10
0
λ
2y
1y
2t → τ = −t
[ ] = [
] [ ] ,
d d τy
y
1 2| |
λ
10
0
| |
λ
2y
1y
2t → τ = −t
,
λ
1λ
2A^
> 0 >
λ
1λ
2(0, 0)
(ξ, η) → ( , )
y
1y
2[ ] = [
] [ ] .
d d ty
y
1 2λ
10
0
−| |
λ
2y
1y
2=
,
=
.
y
1C
1e
λ1ty
2C
2e
−| | tλ2≠ 0
C
1y
2y
1t
=
,
2 3 −| / |λ2 λ1(10)
(11)
(12) gdzie
Portret fazowy układu ( 9 ) w tym przypadku wygląda tak, jak to jest pokazane na Rys. 3. Zwrócmy uwagę na to, że osie współrzędnych są również trajektoriami fazowymi układu ( 10 ). Oś pozioma odpowiada przypadkowi ; oś pionowa odpowiada przypadku osobliwemu . Te dwie trajektorie fazowe nie są wyrażone poprzez wzór ( 9 )
y1 y2
Rysunek 3: Portret fazowy układu (9)
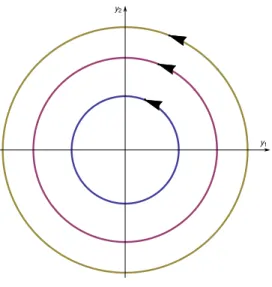
4. Przypadek gdy wartości własne macierzy są czysto urojone i róznią się znakiem: . W tym przypadku punkt przestrzeni fazowej nazywa się środkiem.środkiem. Istnieje liniowa zamiana zmiennych taka, że w nowych zmiennych układ ( 3 ) ma postać
Rozwiązanie tego układu dane jest wzorami
Rozwiązania te są funkcjami okresowymi. W płaszczyźnie fazowej na rysunku Rys. 4 są one przedstawione w postaci krzywych (orbit) zamkniętych.
=
,
y
2C
3y
1−| / |λ2 λ1=
⋅ {
C
3C
21/
( )
C
1, gdy
> 0,
/ λ2λ1C
1−1/ (| |
C
1)
λ2/λ1, gdy
C
1< 0.
= 0
C
2= 0
C
1,
λ
1λ
2A^
λ
1,2= ± i ω
(0, 0)
(ξ, η) → ( , )
y
1y
2[ ] = [
] [ ] .
d d ty
y
1 20
ω
−ω
0
y
y
12= A cos ωt + B sin ωt,
= ω[B cos ωt − A sin ωt] .
y1 y2
Rysunek 4: Portret fazowy układu (11)
5. Przpadek gdy wartości własne macierzy są zespolone, czyli .
W tym przypadku punkt przestrzeni fazowej nazywa się ogniskiemogniskiem niestabilnym w przypadku gdy oraz stabilnym gdy .
Portret fazowy ogniska niestabilnego przedstawionno na Rys. 5. Portret fazowy ogniska stabilnego wygląda podobnie, przy czym trajektorie są tu skierowane do początku układu współrzędnych.
y1 y2
Rysunek 5: Obraz ogniska niestabilnego na płaszczyźnie fazowej.
Zachodzi
TWIERDZENIE
Twierdzenie 1:
Twierdzenie 1:
Charakter punktów stacjonarnych oraz przebieg trajektorii w ich małym otoczeniu jakościowo nie zmienia się przy dodaniu członów nieliniowych, odrzuconych pod czas przejścia do układów zlinearyzowanych, dla wszystkich wymienionych przypadków za wyjątkiem środka.za wyjątkiem środka.
,
λ
1λ
2A^
λ
1,2= α ± i ω
(0, 0)
α > 0
UWAGA
Uwaga 1:
Uwaga 1:
Klasyfikację podobną do podanej dla przypadku stosuje się również do zlinearyzowanego układu -wymiarowego ( 2 ). Analog sformułowanego wyżej twierdzenia mówi, że układ wyjsciowy oraz jego linearyzacja posiadają podobne
jakościowo portrety fazowe w małym otoczeniu punktu stacjonarnego, gdy macierz linearyzacji nie posiada wartości własnyh o zerowych częściach rzeczywistych.
Publikacja udostępniona jest na licencji Creative Commons Uznanie autorstwa - Na tych samych warunkach 3.0 Polska. Pewne prawa zastrzeżone na rzecz autorów i Akademii Górniczo-Hutniczej. Zezwala się na dowolne wykorzystanie treści publikacji pod warunkiem wskazania autorów i Akademii Górniczo-Hutniczej jako autorów oraz podania informacji o licencji tak długo, jak tylko na utwory zależne będzie udzielana taka sama licencja. Pełny tekst licencji dostępny na stronie
http://creativecommons.org/licenses/by-sa/3.0/pl/.
Data generacji dokumentu: 2019-04-15 07:29:29
Oryginalny dokument dostępny pod adresem: https://epodreczniki.open.agh.edu.pl/openagh-permalink.php? link=a92c8b2d7fce12819fa6c15322184385
Autor: Vsevolod Vladimirov