INSTYTUT MASZYN ROBOCZYCH
LABORATORIUM
z TEORII
MECHANIZMÓW I MASZYN
ZAKŁAD TEORII MECHANIZMÓW I MANIPULATORÓWNR ĆW.:
TEMAT: PROSTOWODY PRZYBLIŻONE
1. WPROWADZENIE
Mechanizmem kierującym nazywamy mechanizm, którego określony punkt
porusza się po z góry założonym torze.
Wśród płaskich mechanizmów kierujących szczególne miejsce zajmują prostowody. Prostowody dzielą się na :
a) dokładne (tor wybranego punktu jest linią prostą)
b ) przybliżone (tor wybranego punktu na pewnym odcinku mało różni się od linii prostej).
Rys. 1. Prostowód dokładny Evansa. Rys. 2. Prostowód dokładny Peaucelliera
Rys.3a. „Odwrócony” prostowód Rys. 3b. Krzywa łącznikowa zakreślona przez prostowód Czebyszewa pkt. E mechanizmu pokazanego na rys.3a
xE 66 63 yE 64 -6 0 B C D E y x xE α BC CE ED DB= = = Wybrany punkt E Wybrany punkt E α AB=BC=BE AB=CD CB=2CE 4 5 AD CD = 0 A D B E C α y x
Klasycznym przykładem prostowodu przybliżonego jest mechanizm dźwigniowy oparty na czworoboku przegubowym (rys. 3a), o odpowiednio dobranych długościach ogniw. Punkt E łącznika zakreśla krzywą łącznikową (rys. 3b). Z praktycznego punktu widzenia interesujące mogą być te fragmenty krzywej łącznikowej które dość dobrze przybliżają poziomą lub pionową linię prostą.
Rys. 4.Mechanizm przesuwu Rys. 5. Żuraw portowy. klatek taśmy filmowej.
W technice ze względu na prostą strukturę i zwartą budowę, częściej stosowane są prostowody przybliżone. I tak np. w konstrukcji mechanizmów przesuwu filmu w kamer i projektorów występuje wymóg stałej chwilowej ekspozycji klatki filmowej przy szybkiej zmianie klatki. To z kolei rodzi zagrożenie poszarpania filmu. Dzięki jednak wykorzystaniu właściwości mechanizmów prostowodowych, opartych na czworoboku przegubowym (rys. 4) - uzyskanie pożądanych cech stało się możliwe. Taką samą strukturę mają żurawie portowe (rys. 5.), w których dąży się do tego, aby punkt, E – dzioba żurawia poruszał się po linii poziomej gdyż eliminuje to pracę podnoszenia nosiwa w czasie zmiany wypadu.
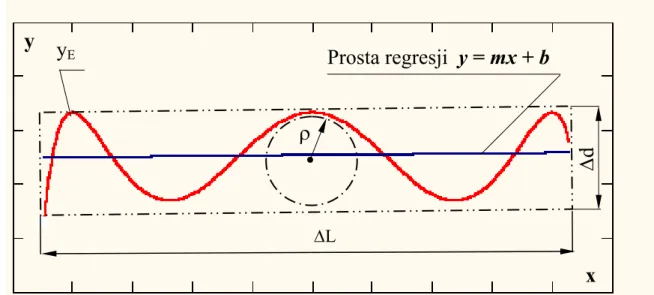
Jakość przybliżenia linii prostej mogą opisywać parametry: A) Błąd prostowodności δ definiowany jako iloraz:
L d ∆ ∆ = δ , (1)
gdzie: ∆d - szerokość prostokątnego pasa tolerancji wewnątrz którego mieści się badany fragment toru rzeczywistego,
Rys. 6. Interpretacja błędu prostowodności δ - jako szerokości pasa tolerancji względem odcinka ∆L
prostej regresji odpowiadającego rozważanemu fragmentowi krzywej łącznikowej.
B) Krzywizna toru k :
k
1
ρ
=
, ρ - promień krzywizny toru (2)Krzywiznę toru punktu E - kE(α), danego współrzędnymi parametrycznymi xE(α) i yE(α), a stanowiącymi analityczne funkcje kąta obrotu - α ogniwa napędowego można wyrazić wzorem:
( )
( )
( )
( )
( )
( )
( )
2 2 2 2 1.5 2 2 E E E E E E Edx
d y
dy
d x
d
d
d
d
k
dx
dy
d
d
α
α
α
α
α
α
α
α
α
α
α
α
α
⋅
−
⋅
=
+
. (3)Znając zmienność wartości bezwzględnej krzywizny toru punktu E w funkcji kąta obrotu α ogniwa napędowego można wyznaczyć przedziały kątowe, gdzie jest prostowodność mechanizmu jest najlepsza.
0.15 kE(α) 30 60 90 120 150 180 210 240 270 300 330 360 0 0.05 0.1 α
Rys. 7. Wykres zmienności wartości bezwzględnej krzywizny toru punktu E w funkcji kąta obrotu - α ogniwa napędowego mechanizmu przedstawionego na rys. 8
y
∆
d
∆LProsta regresji y = mx + b
x
y
Eρ
Ponadto, ponieważ krzywizna toru wybranego punktu mechanizmu jest funkcją kąta - α ogniwa napędowego oraz długości ogniw mechanizmu l1, l2,...lm. Różniczkując więc cząstkowo funkcję (3) wzgl. długości poszczególnych ogniw możliwe jest badanie zmienności składowych gradientu krzywizny (tab.1). Wartości składowych gradientu w rozpatrywanym przedziale kąta α stanowią miarę wrażliwości krzywizny toru na zmianę długości poszczególnych ogniw.
Tab. 1. Tabela składowych gradientu krzywizny mechanizmu przedstawionego na rys.8 α[ ° ]
( )
1 Ek
l
α
∂
∂
( )
2 Ek
l
α
∂
∂
( )
3 Ek
l
α
∂
∂
( )
4 Ek
l
α
∂
∂
54 0.001 0.001 -0.001 0.001 64 0 0 -0.001 0 74 0 0 0 0 84 0 0 0 0 94 0 0 0 0 104 0 0 0 0 114 0 0 0 0 124 0 0 0 0 134 0 0 0 0 144 0.001 0 0 0 154 0.001 0 0 0.001 164 0 0.001 0.001 -0.001 174 -0.005 0.006 0.006 -0.008 2. CEL ĆWICZENIA- poznanie własności i zastosowań mechanizmów kierujących na przykładzie prostowodów, - prostowodność – jako funkcja celu w syntezie mechanizmów prostowodowych,
- miary prostowodności,
- analiza wpływu niedokładności geometrycznych ogniw na prostowodność (ocena wrażliwości geometrycznej prostowodów).
3. PRZEBIEG ĆWICZENIA 3.1. Część pomiarowa
1) Narysować strukturę badanego modelu prostowodu oraz ustalić wymiary poszczególnych ogniw mechanizmu (patrz rys.8).
2) Przyjąć układ współrzędnych o początku w osi obrotu ogniwa napędowego.
Uwaga!
Dla potrzeb analizy teoretycznej wygodnie jest na schemacie jedną z osi układu przeprowadzić przez którąś z par przyostojowych. Może się jednak okazać, że układ współrzędnych modelu, w stosunku do układu który został przyjęty w narysowanym schemacie wykazuje przesunięcie fazowe o kąt - φ (jest obrócony o pewien stały kąt φ - nazywany dalej kątem przesunięcia fazowego).
3) Identyfikacja kąta przesunięcia fazowego φ.
4) Określenie (przez prowadzącego) zakresu kątowego położeń ogniwa napędowego - α dla
których przeprowadzona zostanie analiza mechanizmu oraz kroku próbkowania – ∆α (np. co 5°),
[
max min]
α
=
α
−
α
. (4)5) Ustawiwszy ogniwo napędowe w położeniu początkowym odpowiadającym kątowi αmin, odczytać współrzędną xE(αmin) określoną przez położenie końca czujnika zegarowego na listwie pomiarowej. Wskazania czujnika zegarowego → stanowią wartość współrzędnej
yE(αmin) (w układzie współrzędnych wyznaczonych przez listwę pomiarową).
6) Zmieniając położenia kątowe ogniwa napędowego o wartość ∆α, dokonać pomiarów przemieszczeń punktu E mechanizmu (tj. punktu zamocowania czujnika zegarowego), wpisując otrzymane wartości współrzędnych xE(α) i yE(α) odpowiednio w kolumnach: 3 i 4 tabeli 1.
ZAŁOŻENIA
I. Pomiarów wartości xE(α) i yE(α) dokonuje się w układzie współrzędnych x 0 y, związanym z listwą pomiarową,
a) oś 0 x pokrywa się z listwa pomiarową,
b) dla całego przedziału [αmin, αmax], czujnik zegarowy jest prostopadły do listwy pomiarowej.
II. Pomiary i obliczenia dotyczą tych samych położeń mechanizmu
(spełnione po uwzględnieniu kąta przesunięcia fazowego φ i zachowaniu jednakowego kroku próbkowania ∆α ). 3.2. Część obliczeniowa
1) W oparciu o przyjęty schemat kinematyczny mechanizmu wyznaczyć równania parametryczne toru punktu E w funkcji kąta obrotu ogniwa napędowego - α.
Rys. 8. Przykładowy schemat mechanizmu prostowodowego
x
E( )
α
=
l cos
0A( )
α
+
l cos
AE( )
β
, (5)y
E( )
α
=
l sin
0 A( )
α
+
l sin
AE( )
β
. (6) E β C B 0 α x y Aγ
39 150 200 250 3002) Na podstawie wyznaczonych równań parametrycznych narysować krzywą łącznikową (trajektorię punktu E), zaś wyliczone wartości współrzędnych xE(α) i yE(α) odpowiednio w kolumnach: 7 i 8 tabeli 2.
3) Wyznaczyć błąd prostowodności (1) badanego mechanizmu dla danego zakresu zmienności kąta α:
a) rzeczywisty (w oparciu o wyniki pomiarów),
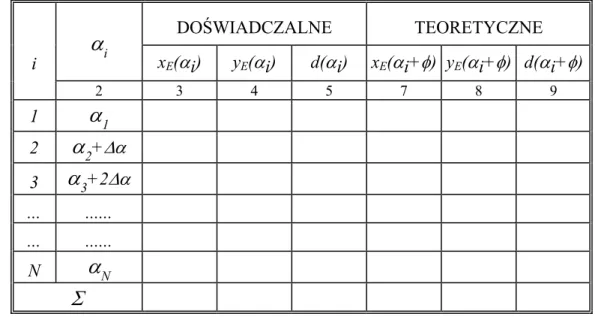
b) teoretyczny (w oparciu o wyznaczone równania parametryczne toru punktu E). Tab. 2. Tabela wyników
DOŚWIADCZALNE TEORETYCZNE
α
i xE(αi) yE(αi) d(αi) xE(αi+φ) yE(αi+φ) d(αi+φ) i 2 3 4 5 7 8 9 1α
1 2α
2+∆α 3α
3+2∆α ... ... ... ... Nα
NΣ
Wyliczenie błędu prostowodności wymaga określenia odległości punktów krzywej łącznikowej od prostej regresji d(αi), której wpółczynniki m i b należy uprzednio wyznaczyć (rys. 6), 2
( )
( )
( )
1
E i E i im x
y
b
d
m
α
α
α
=
⋅
−
+
+
. (7)Długość pasa tolerancji ∆L można wyznaczyć ze wzoru (7):
( )
( )
1( )
( )
1 21
E N E E N Ex
x
m y
y
L
m
α
−
α
+
⋅
α
−
α
∆ =
+
. (8)Uwaga:
Po obróceniu układów współrzędnych o kąt φ = arc tg(m) → wówczas wprost:
( )
o( )
,
i E id
α
=
y
α
(9)( )
( )
1.
o o E N EL
x
α
x
α
∆ =
−
(10)Patrz → Dodatek str. 7. Pytania kontrolne
1. Co to są mechanizmy kierujące? 2. Podstawowy podział prostowodów.
3. Zastosowanie mechanizmów prostowodowych. 4. Miary prostowodności.
5. Gradient krzywizny – jako miara wrażliwości prostowodu na zmianę parametrów geometrycznych.
LITERATURA
1. W. Moszyński: „Wykład elementów maszyn”, Część IV, str 112-125 PWT 1955 r. 2. A. Olędzki: „ Podstawy teorii maszyn i mechanizmów”, str 234-235 WNT 1987 r. DODATEK:
A.
W programie Mathcad istnieją wbudowane operatory, działające na wektorach współrzędnych punktów x i y wyznaczające metodą najmniejszych kwadratów współczynniki prostej regresji:
x = [xE(α1), xE(α2),... xE (αi),.. xE(αΝ)]T
⇒ m:= slope(x, y), b:= intercept(x, y), (10) y = [yE(α1), yE(α2),... yE(αi),.. xE (αΝ)]T
W programie Grapher prostą regresji można uzyskać wprost, jako aproksymację wykresu funkcją liniową przy użyciu opcji „Fits”.
B.
Transformacja poprzez obrót układów współrzędnych o kąt ψ = arc tg(m):
![Tab. 1. Tabela składowych gradientu krzywizny mechanizmu przedstawionego na rys.8 α[ ° ] ( ) 1kEl α∂∂ ( )2kElα∂∂ ( )3kElα∂∂ ( )4kElα∂∂ 54 0.001 0.001 -0.001 0.001 64 0 0 -0.001 0 74 0 0 0 0 84 0 0 0 0 94 0 0 0 0 104 0 0 0 0 114 0 0 0 0 12](https://thumb-eu.123doks.com/thumbv2/9liborg/3022685.5172/4.892.229.668.316.677/tabela-składowych-gradientu-krzywizny-mechanizmu-przedstawionego-kelα-kelα.webp)